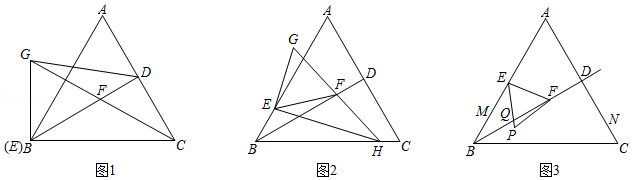
在等边 中, , ,垂足为 ,点 为 边上一点,点 为直线 上一点,连接 .
(1)将线段 绕点 逆时针旋转 得到线段 ,连接 .
①如图1,当点 与点 重合,且 的延长线过点 时,连接 ,求线段 的长;
②如图2,点 不与点 , 重合, 的延长线交 边于点 ,连接 ,求证: ;
(2)如图3,当点 为 中点时,点 为 中点,点 在边 上,且 ,点 从 中点 沿射线 运动,将线段 绕点 顺时针旋转 得到线段 ,连接 ,当 最小时,直接写出 的面积.
如图,在建筑物 左侧距楼底 点水平距离150米的 处有一山坡,斜坡 的坡度(或坡比)为 ,坡顶 到 的垂直距离 米(点 , , , , 在同一平面内),在点 处测得建筑物顶 点的仰角为 ,则建筑物 的高度约为
(参考数据: ; ;

| A. |
69.2米 |
B. |
73.1米 |
C. |
80.0米 |
D. |
85.7米 |
如图,相邻两个山坡上,分别有垂直于水平面的通信基站 和 .甲在山脚点 处测得通信基站顶端 的仰角为 ,测得点 距离通信基站 的水平距离 为 ;乙在另一座山脚点 处测得点 距离通信基站 的水平距离 为 ,测得山坡 的坡度 .若 ,点 , , , 在同一水平线上,则两个通信基站顶端 与顶端 的高度差为(参考数据: ,

| A. |
|
B. |
|
C. |
|
D. |
|
如图,在 中, , 是对角线 上的两点(点 在点 左侧),且 .
(1)求证:四边形 是平行四边形;
(2)当 , , 时,求 的长.

图1是邻边长为2和6的矩形,它由三个小正方形组成,将其剪拼成不重叠、无缝隙的大正方形(如图 ,则图1中所标注的 的值为 ;记图1中小正方形的中心为点 , , ,图2中的对应点为点 , , .以大正方形的中心 为圆心作圆,则当点 , , 在圆内或圆上时,圆的最小面积为 .
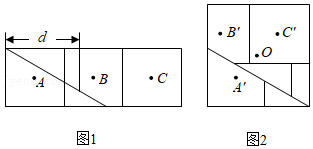
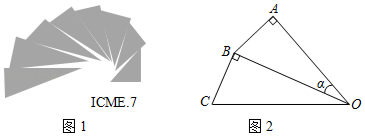
图1是第七届国际数学教育大会 会徽,在其主体图案中选择两个相邻的直角三角形,恰好能组合得到如图2所示的四边形 .若 , ,则 的值为
| A. |
|
B. |
|
C. |
|
D. |
|
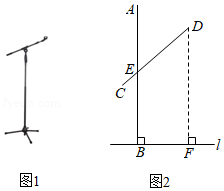
图1是放置在水平地面上的落地式话筒架实物图,图2是其示意图.支撑杆 垂直于地面 ,活动杆 固定在支撑杆上的点 处.若 , , ,求活动杆端点 离地面的高度 .(结果精确到 ,参考数据: , ,
如图,将长、宽分别为 , 的长方形纸片分别沿 , 折叠,点 , 恰好重合于点 .若 ,则折叠后的图案(阴影部分)面积为

| A. |
|
B. |
|
C. |
|
D. |
|
拓展小组研制的智能操作机器人,如图1,水平操作台为 ,底座 固定,高 为 ,连杆 长度为 ,手臂 长度为 .点 , 是转动点,且 , 与 始终在同一平面内.
(1)转动连杆 ,手臂 ,使 , ,如图2,求手臂端点 离操作台 的高度 的长(精确到 ,参考数据: , .
(2)物品在操作台 上,距离底座 端 的点 处,转动连杆 ,手臂 ,手臂端点 能否碰到点 ?请说明理由.

如图, 中, , ,点 是边 的中点,以 为底边在其右侧作等腰三角形 ,使 ,连结 ,则 的值为

| A. |
|
B. |
|
C. |
|
D. |
2 |
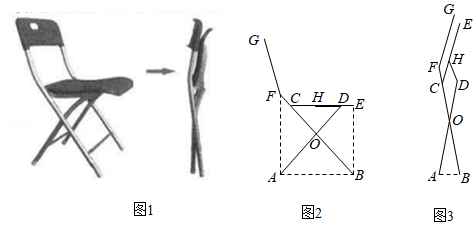
图1是某折叠式靠背椅实物图,图2是椅子打开时的侧面示意图,椅面 与地面平行,支撑杆 , 可绕连接点 转动,且 ,椅面底部有一根可以绕点 转动的连杆 ,点 是 的中点, , 均与地面垂直,测得 , , .
(1)椅面 的长度为 .
(2)如图3,椅子折叠时,连杆 绕着支点 带动支撑杆 , 转动合拢,椅面和连杆夹角 的度数达到最小值 时, , 两点间的距离为 (结果精确到 .
(参考数据: , ,
我国纸伞的制作工艺十分巧妙.如图1,伞不管是张开还是收拢,伞柄 始终平分同一平面内两条伞骨所成的角 ,且 ,从而保证伞圈 能沿着伞柄滑动.如图2是伞完全收拢时伞骨的示意图,此时伞圈 已滑动到点 的位置,且 , , 三点共线, , 为 中点.当 时,伞完全张开.
(1)求 的长.
(2)当伞从完全张开到完全收拢,求伞圈 沿着伞柄向下滑动的距离.
(参考数据: , ,

如图,在 中, , , 于点 , .若 , 分别为 , 的中点,则 的长为
| A. |
|
B. |
|
C. |
1 |
D. |
|
 粤公网安备 44130202000953号
粤公网安备 44130202000953号