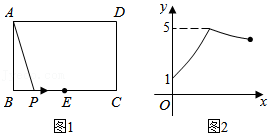
如图1,矩形 中,点 为 的中点,点 沿 从点 运动到点 ,设 , 两点间的距离为 , ,图2是点 运动时 随 变化的关系图象,则 的长为
| A. |
4 |
B. |
5 |
C. |
6 |
D. |
7 |
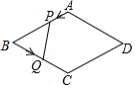
如图,菱形 的边长为2, ,点 和点 分别从点 和点 出发,沿射线 向右运动,且速度相同,过点 作 ,垂足为 ,连接 ,设点 运动的距离为 , 的面积为 ,则能反映 与 之间的函数关系的图象大致为

A. B.
B.
C. D.
D.
如图,菱形 的边长是4厘米, ,动点 以1厘米秒的速度自 点出发沿 方向运动至 点停止,动点 以2厘米 秒的速度自 点出发沿折线 运动至 点停止.若点 、 同时出发运动了 秒,记 的面积为 厘米 ,下面图象中能表示 与 之间的函数关系的是
A. B.
B.
C. D.
D.
如图,等腰直角三角形 , , ,以点 为中心的正方形 边长为 , ,正方形 与等腰直角三角形 重叠部分的面积为 ,则大致能反映 与 之间的函数关系的图象为

A. B.
B.
C. D.
D.
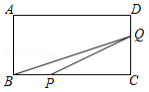
如图,在矩形 中, , ,动点 , 同时从点 出发,点 沿 的路径运动,点 沿 的路径运动,点 , 的运动速度相同,当点 到达点 时,点 也随之停止运动,连接 .设点 的运动路程为 , 为 ,则 关于 的函数图象大致是

| A. |
|
B. |
|
| C. |
|
D. |
|
如图,已知矩形 中, , .动点 在边 上从点 向 运动,速度为 ;同时动点 从点 出发,沿折线 运动,速度为 .当一个点到达终点时,另一个点随之停止运动.设点 运动的时间为 , 的面积为 ,则描述 与时间 的函数关系的图象大致是
A.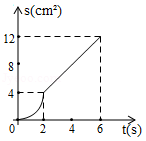 B.
B.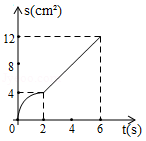
C.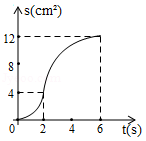 D.
D.
某校机器人兴趣小组在如图①所示的矩形场地上开展训练.机器人从点 出发,在矩形 边上沿着 的方向匀速移动,到达点 时停止移动.已知机器人的速度为1个单位长度 ,移动至拐角处调整方向需要 (即在 、 处拐弯时分别用时 ).设机器人所用时间为 时,其所在位置用点 表示, 到对角线 的距离(即垂线段 的长)为 个单位长度,其中 与 的函数图象如图②所示.
(1)求 、 的长;
(2)如图②,点 、 分别在线段 、 上,线段 平行于横轴, 、 的横坐标分别为 、 .设机器人用了 到达点 处,用了 到达点 处(见图①).若 ,求 、 的值.

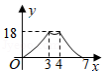
如图1, 的直径 厘米,点 在 上,设 的度数为 (单位:度, ,优弧 的弧长与劣弧 的弧长的差设为 (单位:厘米),图2表示 与 的函数关系,则 度.

如图,已知点 ,点 在 轴正半轴上的一动点,以 为边作等腰直角三角形 ,使点 在第一象限, ,设点 的横坐标为 ,点 的纵坐标为 ,则表示 与 的函数关系的图象大致是

A. B.
B.
C. D.
D.
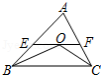
如图,在 中,点 是 的内心,连接 , ,过点 作 分别交 , 于点 , .已知 的周长为8, , 的周长为 ,则表示 与 的函数图象大致是
A. B.
B.
C.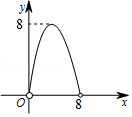 D.
D.
如图,四边形 是矩形, , ,点 在对角线 上(不与点 , 重合), , 过点 , 交 于点 ,交 于点 , 交 于点 ,交 于点 , 交 于点 .设 , ,则 关于 的函数图象是

A. B.
B.
C. D.
D.
如图,在 中, , ,动点 从点 出发,以 的速度沿 方向运动到点 ,动点 同时从点 出发,以 的速度沿折线 方向运动到点 .设 的面积为 ,运动时间为 ,则下列图象能反映 与 之间关系的是

A. B.
B.
C. D.
D.
如图①,在矩形 中,动点 从 出发,以相同的速度,沿 方向运动到点 处停止.设点 运动的路程为 , 面积为 ,如果 与 的函数图象如图②所示,则矩形 的面积为 .

已知,等边三角形 和正方形 的边长相等,按如图所示的位置摆放 点与 点重合),点 、 、 共线, 沿 方向匀速运动,直到 点与 点重合.设运动时间为 ,运动过程中两图形重叠部分的面积为 ,则下面能大致反映 与 之间关系的函数图象是

A. B.
B.
C. D.
D.




 B.
B.
 D.
D.
 粤公网安备 44130202000953号
粤公网安备 44130202000953号