如图,在平面直角坐标系中,每个最小方格的边长均为1个单位长,P1,P2,P3,…,均在格点上,其顺序按图中“→”方向排列,如: , , , , , …根据这个规律,点P2016的坐标为 .

如图,等边三角形的顶点A(1,1)、B(3,1),规定把等边△ABC“先沿x轴翻折,再向左平移1个单位”为一次変换,如果这样连续经过2016次变换后,等边△ABC的顶点C的坐标为 .

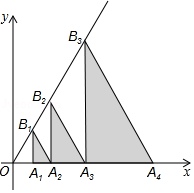
如图, 、 、 、… 都是等边三角形,其中 、 、… 都与x轴垂直,点A1、A2、…An都在x轴上,点B1、B2、…Bn都在直线 上,已知 ,则点A2016的坐标为 .
如图,在平面直角坐标系中, , , .先将四边形ABCD沿x轴翻折,再向右平移8个单位长度,向下平移1个单位长度后,得到四边形A1B1C1D1,最后将四边形A1B1C1D1,绕着点A1旋转,使旋转后的四边形对角线的交点落在x轴上,则旋转后的四边形对角线的交点坐标为( )

A.(4,0)B.(5,0)
C.(4,0)或(﹣4,0)D.(5,0)或(﹣5,0)
如图,在平面直角坐标系中,矩形 AOCB的两边 OA、 OC分别在 x轴和 y轴上,且 OA=2, OC=1.在第二象限内,将矩形 AOCB以原点 O为位似中心放大为原来的 倍,得到矩形 A 1 OC 1 B 1,再将矩形 A 1 OC 1 B 1以原点 O为位似中心放大 倍,得到矩形 A 2 OC 2 B 2…,以此类推,得到的矩形 A n O∁ n B n的对角线交点的坐标为 .

在平面直角坐标系中,一个智能机器人接到如下指令:从原点 O出发,按向右,向上,向右,向下的方向依次不断移动,每次移动1 m.其行走路线如图所示,第1次移动到 A 1,第2次移动到 A 2,…,第 n次移动到 A n.则△ OA 2 A 2018的面积是( )

| A. |
504m 2 |
B. |
m 2 |
C. |
m 2 |
D. |
1009m 2 |
在平面直角坐标系中,对于点 P( a, b),我们把 Q(﹣ b+1, a+1)叫做点 P的伴随点,已知 A 1的伴随点为 A 2, A 2的伴随点为 A 3,…,这样依次下去得到 A 1, A 2, A 3,…, A n,若 A 1的坐标为(3,1),则 A 2018的坐标为 .
如图,直线l: ,点A1坐标为(﹣3,0).过点A1作x轴的垂线交直线l于点B1,以原点O为圆心,OB1长为半径画弧交x轴负半轴于点A2,再过点A2作x轴的垂线交直线l于点B2,以原点O为圆心,OB2长为半径画弧交x轴负半轴于点A3,…,按此做法进行下去,点A2016的坐标为 .

如图,在平面直角坐标系中, …,都是等边三角形,且点A1,A3,A5,A7,A9的坐标分别为 ,依据图形所反映的规律,则A100的坐标为 .

在平面直角坐标系中,点 P( x, y)经过某种变换后得到点 P'(﹣ y+1, x+2),我们把点 P'(﹣ y+1, x+2)叫做点 P( x, y)的终结点.已知点 P 1的终结点为 P 2,点 P 2的终结点为 P 3,点 P 3的终结点为 P 4,这样依次得到 P 1、 P 2、 P 3、 P 4、… P n、…,若点 P 1的坐标为(2,0),则点 P 2017的坐标为 .
如图,在平面直角坐标系中,一动点从原点 出发,沿着箭头所示方向,每次移动1个单位,依次得到点
出发,沿着箭头所示方向,每次移动1个单位,依次得到点 ,
, ,
, ,
, ,
, ,
, ,
, ,则点
,则点 的坐标是 .
的坐标是 .

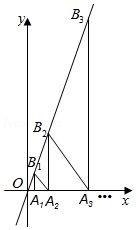
如图,在坐标轴上取点A1(2,0),作x轴的垂线与直线y=2x交于点B1,作等腰直角三角形A1B1A2;又过点A2作x轴的垂线交直线y=2x交于点B2,作等腰直角三角形A2B2A3;…,如此反复作等腰直角三角形,当作到An(n为正整数)点时,则An的坐标是 .
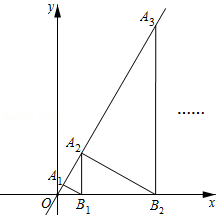
如图,过直线 上的点 作 ,交 轴于点 ,过点 作 轴.交直线 于点 ;过点 作 ,交 轴于点 ,过点 作 轴,交直线 于点 ; 按照此方法继续作下去,若 ,则线段 的长度为 .(结果用含正整数 的代数式表示)
如图,在平面直角坐标系中,将边长为1的正六边形 绕点 顺时针旋转 个 ,得到正六边形 ,则正六边形 的顶点 的坐标是

| A. |
|
B. |
|
C. |
|
D. |
|
 粤公网安备 44130202000953号
粤公网安备 44130202000953号
