如图,△,△
,△
,
,△
,都是一边在
轴上的等边三角形,点
,
,
,
,
都在反比例函数
的图象上,点
,
,
,
,
,都在
轴上,则
的坐标为 .

如图,在平面直角坐标系中,点的坐标为
,
,将线段
绕点
按顺时针方向旋转
,再将其长度伸长为
的2倍,得到线段
;又将线段
绕点
按顺时针方向旋转
,长度伸长为
的2倍,得到线段
;如此下去,得到线段
,
,
,
为正整数),则点
的坐标是 .

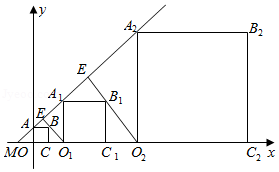
如图,已知直线,直线
和点
,过点
作
轴的平行线交直线
于点
,过点
作
轴的平行线交直线
于点
,过点
作
轴的平行线交直线
于点
,过点
作
轴的平行线交直线
于点
,
,按此作法进行下去,则点
的横坐标为 .

如图,在平面直角坐标系中,的顶点坐标分别为:
,
,
.已知
,作点
关于点
的对称点
,点
关于点
的对称点
,点
关于点
的对称点
,点
关于点
的对称点
,点
关于点
的对称点
,
,依此类推,则点
的坐标为 .

如图,点 , , 在反比例函数 的图象上,点 , , , 在 轴上,且 ,直线 与双曲线 交于点 , , , ,则 为正整数)的坐标是

| A. |
, |
B. |
|
C. |
, |
D. |
, |
如图,直线的解析式为
与
轴交于点
,与
轴交于点
,以
为边作正方形
,点
坐标为
.过点
作
交
于点
,交
轴于点
,过点
作
轴的垂线交
于点
,以
为边作正方形
,点
的坐标为
.过点
作
交
于
,交
轴于点
,过点
作
轴的垂线交
于点
.以
为边作正方形
.
.则点
的坐标 .
如图,在平面直角坐标系中,四边形,
,
,
都是菱形,点
,
,
,
都在
轴上,点
,
,
,
都在直线
上,且
,
,则点
的坐标是 .

如图,在单位长度为1米的平面直角坐标系中,曲线是由半径为2米,圆心角为 的 多次复制并首尾连接而成.现有一点 从 为坐标原点)出发,以每秒 米的速度沿曲线向右运动,则在第2019秒时点 的纵坐标为

| A. |
|
B. |
|
C. |
0 |
D. |
1 |
在平面直角坐标系中,抛物线的图象如图所示.已知
点坐标为
,过点
作
轴交抛物线于点
,过点
作
交抛物线于点
,过点
作
轴交抛物线于点
,过点
作
交抛物线于点
,依次进行下去,则点
的坐标为 .

如图所示,在平面直角坐标系中,一组同心圆的圆心为坐标原点
,它们的半径分别为1,2,3,
,按照“加1”依次递增;一组平行线,
,
,
,
,
都与
轴垂直,相邻两直线的间距为1,其中
与
轴重合.若半径为2的圆与
在第一象限内交于点
,半径为3的圆与
在第一象限内交于点
,
,半径为
的圆与
在第一象限内交于点
,则点
的坐标为
为正整数)

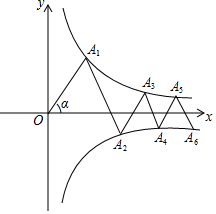
如图,在单位为1的方格纸上,△ ,△ ,△ , ,都是斜边在 轴上,斜边长分别为2,4,6, 的等腰直角三角形,若△ 的顶点坐标分别为 , , ,则依图中所示规律, 的坐标为

| A. |
|
B. |
|
C. |
|
D. |
|
在平面直角坐标系中,一个智能机器人接到的指令是:从原点 出发,按"向上 向右 向下 向右"的方向依次不断移动,每次移动1个单位长度,其移动路线如图所示,第一次移动到点 ,第二次移动到点 第 次移动到点 ,则点 的坐标是

| A. |
|
B. |
|
C. |
|
D. |
|
如图,在平面直角坐标系中,函数和
的图象分别为直线
,
,过
上的点
作
轴的垂线交
于点
,过点
作
轴的垂线交
于点
,过点
作
轴的垂线交
于点
,
依次进行下去,则点
的横坐标为 .

如图,点、
、
在反比例函数
的图象上,点
、
、
在反比例函数
的图象上,
,且
,则
为正整数)的纵坐标为 .(用含
的式子表示)
 粤公网安备 44130202000953号
粤公网安备 44130202000953号
