已知一根质量分布均匀的圆柱体木料质量为 ,体积为 。问:
(1)此木料的密度为多少?
(2)如图所示,甲、乙两人分别在 点和 点共同扛起此木料并恰好水平,其中 , 为木料的中点。求此时乙对木料的作用力大小。
(3)若在(2)中当乙的作用点从 点向 点靠近时,请列式分析此过程中甲对木料作用力大小变化情况。

如图所示是一个水位监测仪的简化模型。杠杆 质量不计, 端悬挂着物体 , 端悬挂着物体 ,支点为 , 。物体 下面是一个压力传感器,物体 是一个质量分布均匀的实心圆柱体,放在水槽中,当水槽中无水时,物体 下端与水槽的底部恰好接触且压力为零,此时压力传感器的示数也为零。已知物体 的质量 ,高度 ,横截面积 取 , 。求:
(1)物体 的密度 ;
(2)物体 的质量 ;
(3)当压力传感器的示数 时,求水槽内水的深度 。

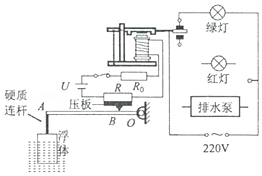
为响应宁波市政府提出的“创建海绵型城市”的号召,小科设计了如图所示的市政自动排水装置模型,控制电路由电压为 、最大容量为 的蓄电池供电,蓄电池用“发电玻璃”制成的太阳能电板充电。 为定值电阻, 为压敏电阻,压敏电阻通过杠杆 与圆柱形浮体相连, ,压敏电阻的阻值随压力变化的关系如下表。(压板、杠杆和硬质连杆的质量及电磁铁线圈电阻忽略不计,所用绿灯、红灯及排水泵的额定电压均为
压敏电阻受到的压力 |
60 |
120 |
180 |
240 |
300 |
360 |
420 |
480 |
|
压敏电阻 阻值 |
500 |
360 |
260 |
180 |
120 |
80 |
65 |
55 |
|
(1)当水位在安全位置以下时绿灯亮,排水泵不工作;当水位达到安全位置上限时红灯亮,同时排水泵正常工作。请按要求完成图中工作电路的连接。
(2)“发电玻璃”光电转化率接近 .要求在 内对控制电路的蓄电池充满电,则选用的“发电玻璃”面积至少为 .(太阳能辐射到每平方米地面上的平均功率按 计算,计算结果精确到
(3)按照设计要求,当水位上升到浮体刚好全部浸入水中时,压敏电阻受到压力为 ,通过电磁铁线圈的电流为 ,排水泵启动;当水位回落到浮体只有 体积浸入水中时,硬质杠杆 仍处于水平位置,线圈中电流为 ,排水泵停止工作,则小科应选择重力为多大的浮体?
(4)在实际调试过程中,小科发现水位已达到安全位置上限,但排水装置还未启动。如果在其他条件保持不变的前提下,要使排水装置符合设计要求,应该将与压敏电阻相连的压板向 (填“左”或“右“ 移动。
为了监测水库的水位,小明设计了利用电子秤显示水库水位的装置。该装置由长方体A和B、滑轮组、轻质杠杆CD、电子秤等组成,且杠杠始终在水平位置平衡,OC:OD=1:2,如图所示。
已知A的体积为0.03m3,A所受的重力600N,B所受的重力为110N;当水位上涨到与A的上表面相平时,水面到水库底部的距离h=20m。不计滑轮和绳的重力与摩擦。已知水的密度为1x103kg/m3.求:
(l)水库底部受到水的压强;
(2)A受到的浮力;
(3)此时电子秤受到B对它的压力。
如图甲所示,底面积为50cm2的圆柱形玻璃筒中装有一定量的水,放在水平台面上,底面积为10cm2的圆柱形物体B浸没在水中,杠杆CD可绕支点O在竖直平面内转动,CO=2DO;物体A是质量为100g的配重物。
在物体A上再加一个0.6N的向下拉力F,杠杆会转动到在水平位置平衡,如图乙所示,此时物体B有2/5的体积露出水面,筒中水的深度比图甲中水的深度下降了0.4cm。
(取10N/kg,杠杆、悬挂物体的细绳的质量均忽略计)
求:(1)物体B的体积;
(2)乙图中物体B所受的浮力大小;
(3)乙图中物体B底部所受水的压强大小;
(4)物体B的密度。
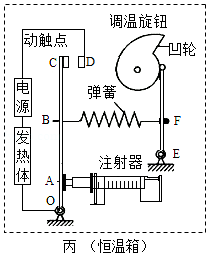
电冰箱是通过温度控制器控制压缩机的开或停来控制温度的。某冰箱的温控制冷和照明电路,如图甲。冰箱内温度控制器工作原理如图乙,硬杆 可绕固定点 转动,感温包内充有感温剂气体,膜盒会因感温包内气体压强的变化而改变对 点的推力大小。

(1)请将答题纸图甲中的 、 、 三个接线头连入家庭电路。
(2)温度控制器接通电路的工作过程是:当感温剂气体温度上升时, ,动触点和固定触点接通,压缩机开始工作。
(3)某同学模拟冰箱温控制冷电路,制作了一个恒温箱,如图丙。恒温箱中温度控制器的轻质硬杆 长为5厘米, 长为12厘米,注射器的最大刻度为30毫升,刻度部分长为10厘米。
|
80 |
160 |
240 |
|
12.8 |
13.6 |
14.4 |
查阅资料得知,在弹性限度内,弹簧的长度 与所挂钩码质量 的关系遵循函数 和 为常数)。为了确定该弹簧 和 的值,在弹簧上挂钩码测得三组数据如上表。
当设定的温度为 时,弹簧长14厘米,触点 和 恰好接通。请计算此时注射器内气体的压强。(已知当时大气压为 帕)
(4)丙图中,温度控制器硬杆上的连结点 、 、 、 均固定,调温旋钮转轴及触点 也固定,调温旋钮已调到最低温度,在不更换元件的情况下,如何将恒温箱设定温度调节得更低?
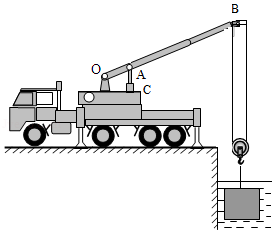
图是液压汽车起重机从水中打捞重物的示意图。A是动滑轮,B是定滑轮,C是卷扬机,D是油缸,E是柱塞。卷扬机转动使钢丝绳带动动滑轮上升,同时提升重物。被打捞的重物体积是 ,若在本次打捞前,起重机对地面的压强 p0=2.0×107Pa,当物体在水中匀速上升时起重机对地面的压强p1=2.375×107Pa,物体全部出水面后起重机对地面的压强p2=2.5×107Pa,假设起重时柱塞沿竖直方向,物体出水前、后柱塞对吊臂的支撑力分别为N1和N2,N1与N2之比为19:24。重物出水后上升的速度
,若在本次打捞前,起重机对地面的压强 p0=2.0×107Pa,当物体在水中匀速上升时起重机对地面的压强p1=2.375×107Pa,物体全部出水面后起重机对地面的压强p2=2.5×107Pa,假设起重时柱塞沿竖直方向,物体出水前、后柱塞对吊臂的支撑力分别为N1和N2,N1与N2之比为19:24。重物出水后上升的速度 ,吊臂、定滑轮、钢丝绳的重以及轮与绳的摩擦不计。(g取10N/kg)求:
,吊臂、定滑轮、钢丝绳的重以及轮与绳的摩擦不计。(g取10N/kg)求:
(1)被打捞物体的密度;
(2)若被打捞物体在水中匀速上升时滑轮组AB 的机械效率为 ,物体全部露出水面在空气中匀速上升时,滑轮组AB 的机械效率为
,物体全部露出水面在空气中匀速上升时,滑轮组AB 的机械效率为 ,求
,求
(3)重物出水后,卷扬机牵引力的功率。
用如图(1)所示的装置提升重物,水平横梁AB 固定在支架C顶端,OA: OB=4:1。横梁A端挂一底面积为S=0.1m2的配重M,横梁B端下挂着由质量相等的四个滑轮组成的滑轮组,用此滑轮组多次提升不同的物体,计算出滑轮组的机械效率,并记入下面的表格。
| 物重G/N |
60 |
80 |
100 |
180 |
| 机械效率η |
0.75 |
0.80 |
0.833 |
0. 90 |

现用滑轮组分别提升甲、乙两个物体:在水面以上提升密度为ρ甲=0.75kg/dm3的甲物体时,绳自由端的拉力为F1,F1做的功为W1,配重M对地面的压强变化量为ΔP1;在水面以下提升密度为ρ乙=5.6kg/dm3的乙物体时,绳自由端的拉力为F2,F2做的功为W2,配重M对地面的压强变化量ΔP2。
F1、F2所做的功随时间变化的关系如图(2)所示。已知:甲、乙两物体的体积关系为V甲=4V乙,提升甲、乙两物体时速度相同。(不计绳的质量、杠杆的质量、轮与轴的摩擦、水对物体的阻力。取g =10N/kg)求:
(1)配重M对地面的压强变化量的差ΔP2-ΔP1
(2)滑轮组提升浸没在水中的乙物体时的机械效率。(保留百分号前面一位小数)
我市经济建设中用到大量机械设备,某种起重机结构如图所示,起重机的吊臂 可以看作杠杆,吊臂前段用钢绳连着滑轮,立柱 竖直, .用该起重机将浸没在水中的长方体石墩提起,放在水平地面上,石墩质量为 、底面积为 、高为 取 ,
(1)浸没在水中的石墩(石墩的底部未浸入淤泥中),受到浮力是多少?
(2)石墩放在水平地面上时,起重机未对石墩施力,则石墩对底面的压强是多少?
(3)石墩完全离开水面被提升的过程中,测得每根钢绳的拉力为 ,此时动滑轮的机械效率是多少?
(4)当石墩被提起且仍浸没在水中时,若忽略动滑轮、钢绳和吊臂的重力及各种摩擦,起重机立柱 对吊臂 点竖直向上的作用力是多少?
图是液压汽车起重机从水中打捞重物的示意图。C是卷扬机,E是液压机的柱塞,能够竖直向上支撑起重臂OMB。在起重臂的两端分别固定有定滑轮,图中虚线框内是悬挂在起重臂B端的滑轮组(未画完整,其中A是定滑轮),卷扬机经O点和B点的定滑轮拉动滑轮组的钢丝绳自由端K,使重物始终以恒定的速度匀速上升。当重物完全浸没在水中上升的过程中,地面对起重机的支持力N1为1.225×105N,柱塞E对起重臂的支撑力为F1,卷扬机对钢丝绳自由端K的拉力T1为6.25×103N,滑轮组的机械效率为η;重物被完全拉出水面后上升的过程中,地面对起重机的支持力N2为1.375×105N,柱塞E对起重臂的支撑力为F2,卷扬机的输出功率P2为5kW,对钢丝绳自由端K的拉力为T2。已知定滑轮A的质量mA为200kg,虚线框内动滑轮的总质量mD为250kg,F1:F2=9:14。若不计起重臂、钢丝绳的质量及滑轮组的摩擦,g取10N/kg,求: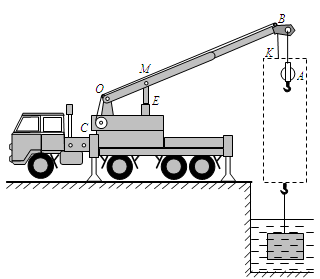
(1)被打捞的重物浸没在水中时受到的浮力F浮;
(2)滑轮组的机械效率η;
(3)卷扬机拉动钢丝绳的速度v。
图是某科研小组设计的在岸边打捞水中物品的装置示意图。O为杠杆BC的支点,CO:OB=1:4。配重E通过绳子竖直拉着杠杆C端,其质量mE=644kg。定滑轮和动滑轮的质量均为m0。人拉动绳子,通过滑轮组提升浸没在水中的物品。当物体A在水面下,小明以拉力F1匀速竖直拉动绳子,滑轮组的机械效率为η1,配重E对地面的压力为N1;当物体A完全离开水面,小明以拉力F2匀速竖直拉动绳子,滑轮组的机械效率为η2,配重E对地面的压力为N2。已知:GA=950N,η2=95%,N1:N2=6:1,绳和杠杆的质量、滑轮与轴及杠杆支点处的摩擦、水对物体A的阻力均可忽略不计,g取10N/kg。求:
(1)物体在水面下受到的浮力;
(2)F1:F2的值
(3) η1的大小。
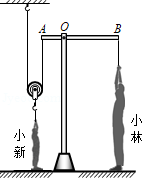
如图所示,站在水平地面上的小林想通过杠杆 和动滑轮拉起同样站在水平地面上的小新。杠杆 可绕转轴 在竖直平面内转动,且 ,小林的质量 。小新的质量 ,小新双脚与地面接触面积 。当小林施加竖直向下的拉力 时,小新未被拉动,此时小新对地面的压强 ,小林对地面的压强为 ;当小林施加竖直向下的拉力 时,小新刚好被拉起,小林对地面的压强为 ,且 。不计绳重,杠杆重力和一切摩擦, 取 。求:
(1)小林施加拉力 时,小新对地面的压力 ;
(2)动滑轮重力 。
如图是利用电子秤监控水库水位的模拟装置,由长方体A和B、滑轮组、轻质杠杆CD、电子秤等组成。杠杆始终在水平位置平衡。已知OC:OD=1:2,A的体积为0.02m 3,A重为400N,B重为150N,动滑轮重100N,不计绳重与摩擦(ρ 水=1.0×10 3kg/m 3)。求:
(1)A的密度;
(2)单独使用该滑轮组在空气中匀速提升A时的机械效率;
(3)水位上涨到A的上表面时,A受到的浮力;
(4)水位上涨过程中,电子秤所受的最大压力。

不计自重的钓鱼杆ABCD,在钓鱼时杆的前段CD部分自然弯曲,杆的后部ABC部分保持直线状态(情景如图甲)。物理模型分析图如图乙,一个金属鱼模型(重力FG=20N)系在钓鱼线DE的下端,当模型鱼浸没在水中静止时钓线的拉力FD=18N,此时杆ABC部分与水平面成30°角,钓鱼者一手握在B点,一手握在A端,A端到竖直钓线的距离AP=3.75m,钓鱼者对A端施加竖直向下的力记作FA,已知。
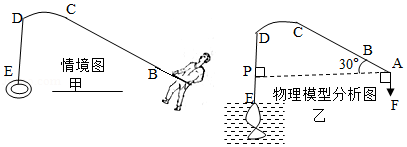
(1)求金属鱼模型所受到的浮力:
(2)将钓鱼杆ABCD当作杠杆研究,若以B点为支点,画出动力臂BA′(l1)和阻力臂BP′(l2),计算出FA的大小;
(3)若以A端为支点研究杠杆ABCD,判断人手对B点的“拉抬力”FB与钓线的拉力FD的大小关系并说明理由。
如图所示装置,杠杆OB可绕O点在竖直平面内转动,OA∶AB=1∶2。当在杠杆A点挂一质量为300kg的物体甲时,小明通过细绳对动滑轮施加竖直向下的拉力为F1,杠杆B端受到竖直向上的拉力为T1时,杠杆在水平位置平衡,小明对地面的压力为N1;在物体甲下方加挂质量为60kg的物体乙时,小明通过细绳对动滑轮施加竖直向下的拉力为F2,杠杆B点受到竖直向上的拉力为T2时,杠杆在水平位置平衡,小明对地面的压力为N2。已知N1∶N2=3∶1,小明受到的重力为600N,杠杆OB及细绳的质量均忽略不计,滑轮轴间摩擦忽略不计,取g =10N/kg。求:
(1)拉力T1;
(2)动滑轮的重力G。
 粤公网安备 44130202000953号
粤公网安备 44130202000953号