如图所示,在高h1=30 m的光滑水平平台上,质量m=1 kg的小物块压缩弹簧后被锁扣K锁住,储存了一定量的弹性势能Ep.若打开锁扣K,物块将以一定的水平速度v1向右滑下平台做平抛运动,并恰好能从光滑圆弧形轨道BC上B点的切线方向进入圆弧形轨道.B点的高度h2=15 m,圆弧轨道的圆心O与平台等高,轨道最低点C的切线水平,并与地面上长L=70 m的水平粗糙轨道CD平滑连接;小物块沿轨道BCD运动与右边墙壁发生碰撞.g=10 m/s2.求:
(1)小物块由A运动到B的时间;
(2)小物块原来压缩弹簧时储存的弹性势能Ep的大小;
(3)若小物块与墙壁只发生一次碰撞,碰后速度等大反向,反向运动过程中没有冲出B点,最后停在轨道CD上的某点P(P点没画出).设小物块与轨道CD之间的动摩擦因数为μ,求μ的取值范围.
(18分)图为某种鱼饵自动投放器中的投饵管装置示意图,其下半部AB是一长为2R的竖直细管,上半部BC是半径为R的四分之一圆弧弯管,管口沿水平方向,AB管内有一原长为R、下端固定的轻质弹簧。投饵时,每次总将弹簧长度压缩到0.5R后锁定,在弹簧上端放置一粒鱼饵,解除锁定,弹簧可将鱼饵弹射出去。如果质量为m的鱼饵到达管口C时,对上侧管壁的弹力恰好为mg。不计鱼饵在运动过程中的机械能损失,且锁定和解除锁定时,均不改变弹簧的弹性势能。已知重力加速度为g、求:
(1)质量为m的鱼饵到达管口C时的速度大小VC;
(2)弹簧压缩到0.5R时的弹性势能Ep;
(3)已知地面与水面相距1.5R,若使该投饵管绕AB管的中轴线00′在360°角的范围内缓慢转动,每次弹射时只放置一粒鱼饵,鱼饵的质量在 m到
m到 m之间变化,且均能落到水面。持续投放足够长时间后,鱼饵能够落到水面的最大面积S是多少?
m之间变化,且均能落到水面。持续投放足够长时间后,鱼饵能够落到水面的最大面积S是多少?
如图所示,在竖直平面的xoy坐标系内,一根长为l的不可伸长的细绳,一端固定在拉力传感器A上,另一端系一质量为m的小球.x轴上的P点固定一个表面光滑的小钉,P点与传感器A相距 .现拉小球使细绳绷直并处在水平位置,然后由静止释放小球,当细绳碰到钉子后,小球可以绕钉子在竖直平面内做圆周运动.已知重力加速度大小为g,求:
.现拉小球使细绳绷直并处在水平位置,然后由静止释放小球,当细绳碰到钉子后,小球可以绕钉子在竖直平面内做圆周运动.已知重力加速度大小为g,求:
(1)若小球经过最低点时拉力传感器的示数为7mg,求此时小球的速度大小;
(2)传感器A与坐标原点O之间的距离;
(3)若小球经过最低点时绳子恰好断开,请确定小球经过y轴的位置.
一质量为m1=1 kg、带电量为q=0.5 C的小球M以速度v=4.5 m/s自光滑平台右端水平飞出,不计空气阻力,小球M飞离平台后由A点沿切线落入竖直光滑圆轨道ABC,圆轨道ABC的形状为半径R<4 m的圆截去了左上角127°的圆弧,CB为其竖直直径,在过A点的竖直线OO′的右边空间存在竖直向下的匀强电场,电场强度大小为E=10 V/m.(sin53°=0.8,cos53°=0.6,重力加速度g取10 m/s2)求:
(1)小球M经过A点的速度大小vA;
(2)欲使小球M在圆轨道运动时不脱离圆轨道,求半径R的取值应满足什么条件?
分如图所示,光滑圆弧轨道最低点与光滑斜面在B点用一段光滑小圆弧平滑连接,可认为没有能量的损失,圆弧半径为R=0.5m,斜面的倾角为450,现有一个可视为质点、质量为m=0.1kg的小球从斜面上A点由静止释放,通过圆弧轨道最低点B时对轨道的压力为6N.以B点为坐标原点建立坐标系如图所示(g=l0m/s2)求:
(1)小球最初自由释放位置A离最低点B的高度h.
(2)小球运动到C点时对轨道的压力的大小;
(3)小球从离开C点至第一次落回到斜面上,落点的坐标是多少?
如图所示,在同一竖直平面内,一轻质弹簧一端固定,静止斜靠在光滑斜面上,另一自由端恰好与水平线AB齐平,一长为L的轻质细线一端固定在O点,另一端系一质量为 的小球,O点到AB的距离为2L.现将细线拉至水平,小球从位置C由静止释放,到达O点正下方时,细线刚好被拉断.当小球运动到A点时恰好能沿斜面方向压缩弹簧,不计碰撞时的机械能损失,弹簧的最大压缩量为
的小球,O点到AB的距离为2L.现将细线拉至水平,小球从位置C由静止释放,到达O点正下方时,细线刚好被拉断.当小球运动到A点时恰好能沿斜面方向压缩弹簧,不计碰撞时的机械能损失,弹簧的最大压缩量为 (在弹性限度内),求:
(在弹性限度内),求: 
(1)细线所能承受的最大拉力F;
(2)斜面的倾角 ;
;
(3)弹簧所获得的最大弹性势能 .
.
如图所示,半径R=0.4 m的光滑圆弧轨道BC固定在竖直平面内,轨道的上端点B和圆心O的连线与水平方向的夹角θ=30°,下端点C为轨道的最低点且与粗糙水平面相切,一根轻质弹簧的右端固定在竖直挡板上。质量m=0.1 kg的小物块(可视为质点)从空中A点以v0=2 m/s的速度被水平抛出,恰好从B点沿轨道切线方向进入轨道,经过C点后沿水平面向右运动至D点时,弹簧被压缩至最短,C、D两点间的水平距离L=1.2m,小物块与水平面间的动摩擦因数μ=0.5,g取10 m/s2。求:
(1)小物块经过圆弧轨道上B点时速度vB的大小;
(2)小物块经过圆弧轨道上C点时对轨道的压力大小;
(3)弹簧的弹性势能的最大值Epm。
如图,O、A、B为同一竖直平面内的三个点,OB沿竖直方向, ,
, 。将一质量为m的小球以一定的初动能自O点水平向右抛出,小球在运动过程中恰好通过A点。使此小球带电,电荷量为q(q>0),同时加一匀强电场,场强方向与△OAB所在平面平行。现从O点以同样的初动能沿某一方向抛出此带电小球,该小球通过了A点,到达A点时的动能是初动能的3倍;若该小球从O点以同样的初动能沿另一方向抛出,恰好通过B点,且到达B点的动能为初动能的6倍,重力加速度大小为g。求:
。将一质量为m的小球以一定的初动能自O点水平向右抛出,小球在运动过程中恰好通过A点。使此小球带电,电荷量为q(q>0),同时加一匀强电场,场强方向与△OAB所在平面平行。现从O点以同样的初动能沿某一方向抛出此带电小球,该小球通过了A点,到达A点时的动能是初动能的3倍;若该小球从O点以同样的初动能沿另一方向抛出,恰好通过B点,且到达B点的动能为初动能的6倍,重力加速度大小为g。求:
(1)无电场时,小球到达A点时的动能与初动能的比值;
(2)电场强度的大小和方向。
(19分)如图所示,足够长的光滑绝缘水平台左端固定一被压缩的绝缘轻质弹簧,一个质量 、电量
、电量 的可视为质点的带电小球与弹簧接触但不栓接。某一瞬间释放弹簧弹出小球,小球从水平台右端A点飞出,恰好能没有碰撞地落到粗糙倾斜轨道的最高B点,并沿轨道滑下。已知AB的竖直高度
的可视为质点的带电小球与弹簧接触但不栓接。某一瞬间释放弹簧弹出小球,小球从水平台右端A点飞出,恰好能没有碰撞地落到粗糙倾斜轨道的最高B点,并沿轨道滑下。已知AB的竖直高度 ,倾斜轨道与水平方向夹角为
,倾斜轨道与水平方向夹角为 、倾斜轨道长为
、倾斜轨道长为 ,带电小球与倾斜轨道的动摩擦因数
,带电小球与倾斜轨道的动摩擦因数 。倾斜轨道通过光滑水平轨道CD与光滑竖直圆轨道相连,在C点没有能量损失,所有轨道都绝缘,运动过程小球的电量保持不变。只有过山车模型的竖直圆轨道处在范围足够大竖直向下的匀强电场中,场强
。倾斜轨道通过光滑水平轨道CD与光滑竖直圆轨道相连,在C点没有能量损失,所有轨道都绝缘,运动过程小球的电量保持不变。只有过山车模型的竖直圆轨道处在范围足够大竖直向下的匀强电场中,场强 。(cos37°=0.8,sin37°=0.6,取g=10m/s2)求:
。(cos37°=0.8,sin37°=0.6,取g=10m/s2)求:
(1)被释放前弹簧的弹性势能?
(2)要使小球不离开轨道(水平轨道足够长),竖直圆弧轨道的半径应该满足什么条件?
(3)如果竖直圆弧轨道的半径 ,小球进入轨道后可以有多少次通过竖直圆轨道上距水平轨道高为0.01m的某一点P?
,小球进入轨道后可以有多少次通过竖直圆轨道上距水平轨道高为0.01m的某一点P?
如图所示,一光滑平直轨道上A、B两点处各有一个小球m1和m2,m1=2kg,m2=1kg,平直轨道末端C点处刚好与一光滑的圆弧管道平滑相连,D为圆弧管道的顶点,圆弧半径R=2.5m,两小球半径均为r,r略小于管道半径,且r<<R。其中A点与C点的距离L="12" m.现让m2从B点以v0的速度向前运动并进入圆弧管道,当m2经过圆弧管道的顶部D点时对圆弧轨道的压力恰好为零,与此同时,m1受到一个水平拉力F的作用从静止开始运动,经过一段时间后恰与落下的m2相撞(g取10 m/s2),求: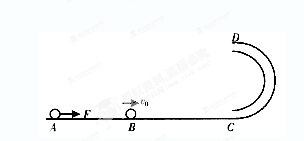
(1)m2在B点出发时的速度v0的大小;
(2)水平拉力F的大小
进入21世纪,低碳环保、注重新能源的开发与利用的理念,已经日益融入生产、生活之中。某节水喷灌系统如图所示,喷口距地面的高度h=1.8m,能沿水平方向旋转,喷口离转动中心的距离a=1.0m水可沿水平方向喷出,喷水的最大速率v0=10m/s,每秒喷出水的质量m0=7.0kg。所用的水是从井下抽取的,井中水面离地面的高度H=3.2m,并一直保持不变。水泵由电动机带动,电动机电枢线圈电阻r=5.0Ω。电动机正常工作时,电动机的输入电压U=220V,输入电流I=4.0A。不计电动机的摩擦损耗,电动机的输出功率等于水泵所需要的最大输入功率。水泵的输出功率与输入功率之比称为水泵的抽水效率。(计算时π取3,球体表面积公式 )试求:
)试求:
⑴求这个喷灌系统所能喷灌的最大面积S;
⑵假设系统总是以最大喷水速度工作,求水泵的抽水效率η;
⑶假设系统总是以最大喷水速度工作,在某地区将太阳能电池产生的电能直接供该系统使用,根据以下数据求所需太阳能电池板的最小面积Smin。
(已知:太阳光传播到达地面的过程中大约有30%的能量损耗,太阳辐射的总功率 ,太阳到地球的距离
,太阳到地球的距离 ,太阳能电池的能量转化效率约为15%。)
,太阳能电池的能量转化效率约为15%。)
如图所示,质量为m=1kg的可视为质点的小物块轻轻放在水平匀速运动的传送带上的P点,随传送带运动到A点后水平抛出,小物块恰好无碰撞的沿圆弧切线从B点进入竖直光滑圆弧轨道下滑,圆弧轨道与质量为M=2kg的足够长的小车左端在最低点O点相切,并在O点滑上小车,水平地面光滑,当物块运动到障碍物Q处时与Q发生无机械能损失的碰撞。碰撞前物块和小车已经相对静止,而小车可继续向右运动(物块始终在小车上),小车运动过程中和圆弧无相互作用。已知圆弧半径R=1.0m,圆弧对应的圆心角θ为53°,A点距水平面的高度h=0.8m,物块与小车间的动摩擦因数为μ=0.1,重力加速度g=10m/s2,sin53°=0.8,cos53°=0.6。试求:
(1)小物块离开A点的水平初速度v1;
(2)小物块经过O点时对轨道的压力;
(3)第一次碰撞后直至静止,物块相对小车的位移和小车做匀减速运动的总时间。
(12分)如图所示,一质量为m=1 kg的小物块轻轻放在水平匀速运动的传送带上的A点,随传送带运动到B点,小物块从C点沿圆弧切线进入竖直光滑的半圆轨道恰能做圆周运动,已知圆弧半径R=0.9 m,轨道最低点为D,D点距水平面的高度h=0.8 m.小物块离开D点后恰好垂直碰击放在水平面上E点的固定倾斜挡板,已知小物块与传送带间的动摩擦因数μ=0.3,传送带以5 m/s恒定速率顺时针转动,g=10 m/s2.求:
(1)传送带AB两端的距离;
(2)小物块经过D点时对轨道的压力的大小;
(3)倾斜挡板与水平面间的夹角θ的正切值.
如图所示是某次四驱车比赛的轨道某一段。小明控制的四驱车(可视为质点),质量m=1.0kg,额定功率为P=7W。小明的四驱车到达水平平台上A点时速度很小(可视为0),此时启动四驱车的发动机并直接使发动机的功率达到额定功率,一段时间后关闭发动机。当四驱车由平台边缘 点飞出后,恰能沿竖直光滑圆弧轨道CDE上C点的切线方向飞入圆形轨道。已知AB间的距离L=6m,BF间高度差h=0.8m,圆轨道的半径R=1m,∠COD=53°,四驱车在AB段运动时的阻力恒为1N。重力加速度g取10m/s2,不计空气阻力。sin53°=0.8,cos53°=0.6,求:
点飞出后,恰能沿竖直光滑圆弧轨道CDE上C点的切线方向飞入圆形轨道。已知AB间的距离L=6m,BF间高度差h=0.8m,圆轨道的半径R=1m,∠COD=53°,四驱车在AB段运动时的阻力恒为1N。重力加速度g取10m/s2,不计空气阻力。sin53°=0.8,cos53°=0.6,求:
(1)求四驱车到达C点时的速度大小;
(2)发动机在水平平台上工作的时间;
(3)四驱车第一次经过D点时对轨道的压力大小。
如图所示是某次四驱车比赛的轨道某一段。小明控制的四驱车(可视为质点),质量 m=1.0kg,额定功率为P=7W。小明的四驱车到达水平平台上A点时速度很小(可视为0),此时启动四驱车的发动机并直接使发动机的功率达到额定功率,一段时间后关闭发动机。当四驱车由平台边缘 点飞出后,恰能沿竖直光滑圆弧轨道CDE上C点的切线方向飞入圆形轨道。已知AB间的距离L=6m,BF间高度差h=0.8m,圆轨道的半径R=1m,∠COD=53°,四驱车在AB段运动时的阻力恒为1N。重力加速度g取10m/s2,不计空气阻力。sin53°=0.8,cos53°=0.6,求:
点飞出后,恰能沿竖直光滑圆弧轨道CDE上C点的切线方向飞入圆形轨道。已知AB间的距离L=6m,BF间高度差h=0.8m,圆轨道的半径R=1m,∠COD=53°,四驱车在AB段运动时的阻力恒为1N。重力加速度g取10m/s2,不计空气阻力。sin53°=0.8,cos53°=0.6,求:
(1)求四驱车到达C点时的速度大小;
(2)发动机在水平平台上工作的时间;
(3)四驱车第一次经过D点时对轨道的压力大小。
 粤公网安备 44130202000953号
粤公网安备 44130202000953号