如图,已知直线11//l2,含30°角的三角板的直角顶点C在l1上,30°角的顶点A在l2上,如果边AB与l1的交点D是AB的中点,那么∠1= 度.
某桥洞是呈抛物线形状,它的截面在平面直角坐标系中如图所示,现测得水面宽AB=16m,桥洞顶点O到水面距离为16m,当水面上升7m时,水面宽为 m.
如图是根据四边形的不稳定性制作的可活动的衣架,图中每个菱形的边长为16cm,若墙上相邻的两个钉子AB之间的距离为cm,则∠α= .
在反比例函数的图象上有三个点的坐标分别为(-1,y1)、(1,y2)和(2,y3),则函数值y1、y2、y3的大小关系是 .
如图,直径CD平分弧AB,请你写出一个正确的结论 .
一元二次方程x2-3x+2=0的解为 .


 cm,则∠α= .
cm,则∠α= .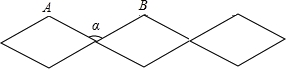
 的图象上有三个点的坐标分别为(-1,y1)、(1,y2)和(2,y3),则函数值y1、y2、y3的大小关系是 .
的图象上有三个点的坐标分别为(-1,y1)、(1,y2)和(2,y3),则函数值y1、y2、y3的大小关系是 .
 粤公网安备 44130202000953号
粤公网安备 44130202000953号