如图所示,n台机器人M1,M2,……,Mn位于一条直线上,检测台M在线段M1 Mn上,n台机器人需把各自生产的零件送交M处进行检测,送检程序设定:当Mi把零件送达M处时,Mi+1即刻自动出发送检(i=1,2,……,n-1)已知Mi的送检速度为V(V>0), 且 记
记 ,n台机器人送检时间总和为f(x).
,n台机器人送检时间总和为f(x).
 |
(1)求f(x)的表达式;
(2)当n=3时,求x的值使得f(x)取得最小值;
(3)求f(x)取得最小值时,x的取值范围.
相关试题
设有关于x的一元二次方程 .
.
(1)若 是从0,1,2,3四个数中任取的一个数,
是从0,1,2,3四个数中任取的一个数, 是从0,1,2三个数中任取的一个数,求上述方程有实根的概率.
是从0,1,2三个数中任取的一个数,求上述方程有实根的概率.
(2)若是从区间 任取得一个数,是从区间
任取得一个数,是从区间 任取的一个数,求上述方程有实根的概率.
任取的一个数,求上述方程有实根的概率.
(1)已知

 ,
,
 .若“
.若“ ”是“
”是“ ”的充分不必要条件,求实数
”的充分不必要条件,求实数 的取值范围;
的取值范围;
(2)已知两个关于x的一元二次方程mx2-4x+4=0和x2-4mx+4m2-4m-5=0,求两方程的根都是整数的充要条件.
从参加环保知识竞赛的学生中抽出60名,将其成绩整理后画出的频率分布直方图如下.观察图形,回答下列问题: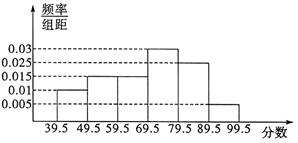
(1)49.5——69.5这一组的频率和频数分别为多少?
(2)估计这次环保知识竞赛成绩的中位数及平均成绩.(精确到小数点后一位)
 的取值范围为[0,10],给出如图所示程序框图,输入一个数
的取值范围为[0,10],给出如图所示程序框图,输入一个数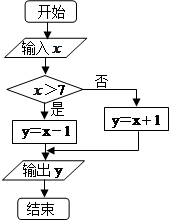
 (
( )的概率;(3)求输出的
)的概率;(3)求输出的 的概率.
的概率. 三个不同地区进口的某种商品进行抽样检测,从各地区进口此种商品的数量(单位:件)如下表所示,工作人员用分层抽样的方法从这些商品中共抽取6件进行检测.
三个不同地区进口的某种商品进行抽样检测,从各地区进口此种商品的数量(单位:件)如下表所示,工作人员用分层抽样的方法从这些商品中共抽取6件进行检测.


推荐套卷
 粤公网安备 44130202000953号
粤公网安备 44130202000953号