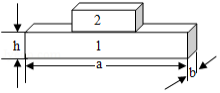
学校机器人兴趣小组进行"精准吊装"实验。7块长短不一的长方体木块均平放在水平地面上,机器人将木块按长度从大到小依次吊装并对称叠放。已知木块的密度相同,高度均为 ,宽度均为 ,不同序号木块的质量如下表,其中 , 取 。
(1)已知1号木块的长度 ,求未叠放时1号木块对地面的压强;
(2)如图,把2号木块吊装到1号木块的上面,求此过程克服木块重力所做的功;
(3)机器人完成全部吊装叠放用时 求整个过程克服木块重力做功的功率。
|
序号 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
质量 |
|
|
|
|
|
|
|
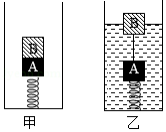
物理兴趣小组设计了一个便携式水深测量仪。它主要是由探头 和控制盒 构成,它们之间用有绝缘皮的细导线相连形成回路,如图甲所示。其中探头 是一个底面积为 、高 、重 的圆柱体,探头 的底部为压敏电阻 与水接触的表面涂有绝缘漆),工作时底部始终与水平面相平,压敏电阻 随表面压力大小的变化如图乙所示。 和 间的电路连接关系如图丙所示,其中电源电压恒为 ,电流表盘改装成深度表(导线的重力与体积均不计)。兴趣小组的同学将探头 缓慢放入水中,求:

(1)探头 有 体积浸入水中时, 底部受到水的压强是多少帕?
(2)探头 全部浸入水中时,导线对探头 的拉力是多少牛?
(3)将探头投入看似不深的水平池底,静止时 与池底未紧密结合)导线已松弛,电流表示数是 ,则表盘 处应该标水的深度值为多少米?
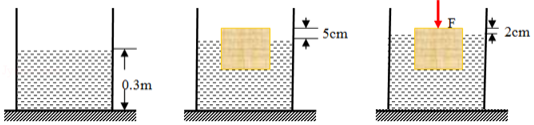
重为 的方形玻璃槽,底面积为 ,放在水平台面上,向槽中加水至水深 (已知 , 取 ,玻璃槽的侧壁厚度不计)
(1)求水对槽底部的压强和槽底对水平台面的压强;
(2)将边长为 的正方体物块轻轻放入水中,当其静止时,测出该物块露出水面的高度为 ,求该物块的密度;
(3)用力 垂直向下作用在物块的上表面,使物块露出水面的高度为 并保持静止,求此时力 的大小。
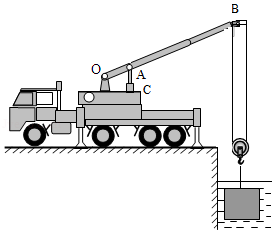
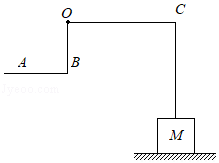
我市经济建设中用到大量机械设备,某种起重机结构如图所示,起重机的吊臂 可以看作杠杆,吊臂前段用钢绳连着滑轮,立柱 竖直, .用该起重机将浸没在水中的长方体石墩提起,放在水平地面上,石墩质量为 、底面积为 、高为 取 ,
(1)浸没在水中的石墩(石墩的底部未浸入淤泥中),受到浮力是多少?
(2)石墩放在水平地面上时,起重机未对石墩施力,则石墩对底面的压强是多少?
(3)石墩完全离开水面被提升的过程中,测得每根钢绳的拉力为 ,此时动滑轮的机械效率是多少?
(4)当石墩被提起且仍浸没在水中时,若忽略动滑轮、钢绳和吊臂的重力及各种摩擦,起重机立柱 对吊臂 点竖直向上的作用力是多少?
小明携带质量为 的行李箱从太原到运城,选择了尾气零排放的动车组 次列车出行。经查询, 次列车时刻表如下。若该动车组列车全程匀速行驶在平直的轨道上,牵引力恒为 ,供电电路输入动车组列车的电功率恒为 .
|
站次 |
站名 |
到达时间 |
开车时间 |
运行里程 |
|
1 |
太原南 |
|
|
0 |
|
2 |
运城北 |
|
|
|
|
3 |
西安北 |
|
|
|
请你根据以上信息,解决下列问题:
问题一:若小明的行李箱底部与列车行李架的接触面积约为 ,求此行李箱对水平行李架的压强。 取
问题二:求该动车组列车从太原南站到运城北站牵引力所做的功。
问题三:求该动车组列车从太原南站到运城北站将电能转化为机械能的效率。
问题四:若大型客运燃油汽车运行中做的功与该动车组列车从太原南站至运城北站牵引力所做的功相等,求该燃油汽车排放气态污染物的质量。(大型客运燃油汽车每做1焦耳的功排放气态污染物

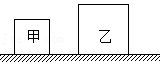
如图所示,甲、乙两质地均匀的正方体放在水平地面上,它们的边长之比l甲:l乙=2:3,质量之比m甲:m乙=2:1,则它们对地面的压力之比F甲:F乙= ,对地面的压强之比p甲:p乙= 。
如图甲所示是小梦家新购买未拆封的电热水器,他发现包装箱上有一铭牌,如图乙所示。待电热器安装完毕注满水后,他关闭了家中的其他用电器,只让电热水器工作,观察到家里的电能表(如图丙所示)的转盘 转了20圈,电热水器中的水从 升高到 用了 。请你结合包装箱上的铭牌和电能表实物图提供的有关参数信息解决以下问题。
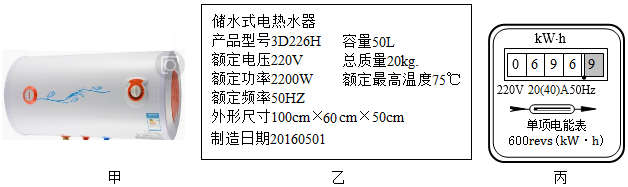
, 取 ,
问题一:铭牌上标有"堆码层数极限4",指包装箱平放时最大堆放层数为4,超过则可能把最底层包装箱压坏。根据包装箱尺寸计算平放时底面积为 ,如果在水平地面上整齐平放堆放4层装有电热水器的包装箱,求上面3层包装箱对最下层包装箱的压强;
问题二:工人师傅把一个装有热水器的包装箱从地面匀速搬到 高的小梦家,求工人师傅对包装箱所做的功;
问题三:求电热水器中的水从 升高到 吸收的热量;
问题四:求电热水器的实际功率和加热效率。
如图是某汽车起重机静止在水平地面上起吊重物的示意图,重物的升降使用的是滑轮组,滑轮组上钢丝绳的收放是由卷扬机来完成的。提升重物前,起重机对地面的压强为 ,某次作业中,将重物甲以 的速度匀速提升时,起重机对地面的压强为 ;若以相同的功率将重物乙以 的速度匀速提升时,起重机对地面的压强为 (不计钢丝绳重和摩擦)
(1)起重机两次提升的重物质量之比。
(2)起重机两次提升重物时,滑轮组的机械效率之比。
(3)提升重物乙时,滑轮组的机械效率是多少?

我市某些餐厅用只能机器人送餐,送餐机器人的部分参数如表所示。
|
功能 |
迎宾、送餐等 |
|
质量 |
|
|
移动速度 |
|
|
电池容量 |
|
|
功率 |
最大功率 |
|
工作电压 |
|
|
最大送餐质量 |
|
(1)机器人身上有感应红外线信息的接收器,以便接受信息,则该接收器相当于反射弧中的 。
(2)机器人底盘的轮子与水平地面接触的总面积为0.01米 ,求机器人水平运送3千克物体(含餐盘)时,对地面产生的压强;
(3)如果该机器人以最大功率在水平地面上以0.4米 秒的速度匀速前进10秒,求机器人行进过程中受到地面对它的阻力。

某兴趣小组为检测操场上的风力等级,设计了一台简易风速仪,其工作原理如图甲所示。装有挡风板和滑片 的轻质滑块与轻质弹簧套在滑杆 上,滑杆上的摩擦力忽略不计,弹簧左端固定,右端与滑块相连。挡风板的挡风面积为0.2米 ,均匀电阻丝 长为30厘米,阻值为15欧,电源电压 恒为9伏,保护电阻 为3欧,电压表量程 伏。弹簧弹力 与弹簧长度改变量 的关系如图乙所示。无风时,滑片 在 处,有风时,滑块移动,稳定后读出电压表示数,计算并查阅如表数据可知风速及风级。
|
风级 |
一级 |
二级 |
三级 |
四级 |
五级 |
六级 |
|
风速 (米 秒) |
|
|
|
|
|
|
|
风压 (帕 |
|
|
|
|
|
|
(1)无风时,求通过
的电流;
(2)为保护电路安全,求出风速仪所测最大风力等级为几级;
(3)某日从天气预报得知,第二天风力等级将会达到五级,风速 预计为 ,在原有电路元件和电路基本连接方式均不变的基础上,电路将如何改进,在图丙的虚线框内将电路补充完整。小组成员还想计算出电路改进后电压表的示数,经查阅资料后得知,该挡风板所受的风压与风速的平方成正比,其关系式为 ,(其中 为常量,数值为 ,假设你为该小组成员,请你计算出风速为 时,改进后的电路中电压表的示数。
如图所示, 是以 为支点的轻质杠杆, , , ,水平地面上的实心均匀正方体物块 重为 ,用细线与 点相连,在 点用 的力沿某方向拉杠杆,使 对地面的压力最小,且杠杆处于水平位置平衡,此时细线的拉力为 ;保持 点的拉力大小和方向以及杠杆的状态不变,要使 对地面的压强变为原来的 ,可将物块 沿竖直方向切去的质量为 。(忽略支点处的摩擦)
智能制造是第四次工业革命的核心技术,如图所示是为圆柱体涂抹防护油的智能装置。其外壳是敞口的长方体容器,距容器底面  处固定一支撑板
处固定一支撑板  ,
,  的中心有一小圆孔,圆柱体放在支撑板
的中心有一小圆孔,圆柱体放在支撑板  的正中央。长方体的左下角有注油口,防护油能够匀速注入长方体容器内部,当油的深度为
的正中央。长方体的左下角有注油口,防护油能够匀速注入长方体容器内部,当油的深度为  时,圆柱体刚好浮起离开支撑板
时,圆柱体刚好浮起离开支撑板  。随着液面升高,圆柱体竖直上浮,当油面上升到压力传感器时,停止注油,此时撑杆的
。随着液面升高,圆柱体竖直上浮,当油面上升到压力传感器时,停止注油,此时撑杆的  点对圆柱体有
点对圆柱体有  的竖直向下的压力。已知
的竖直向下的压力。已知  ,小圆孔面积
,圆柱体底面积
,小圆孔面积
,圆柱体底面积  ,圆柱体重
,圆柱体重  ,支撑板
,支撑板  的厚度不计,
的厚度不计,  取
取  。求:
。求:
(1)注油前,圆柱体对支撑板  的压强;
的压强;
(2)圆柱体刚好浮起离开支撑板  时浸入油中的体积;
时浸入油中的体积;
(3)圆柱体的高度。

如图甲,水平桌面上的容器(厚度不计)底部固定一轻质弹簧(质量和受到的浮力均不计),弹簧上端连有正方体铁块 ,铁块 上表面中心与不吸水的正方体木块 下表面中心用长为 的轻质细绳拴接(细绳质量不计,长度不可伸长), 、 处于静止状态。已知铁块 和木块 的边长均为 , , ,容器底面积 、质量 。弹簧的弹力每变化 ,弹簧的形变量改变 。 , 取 求:
(1)图甲中,容器对水平桌面的压强;
(2)向容器中缓慢注水,直到细绳恰好伸直(细绳不受力),如图乙所示。弹簧对铁块 的支持力是多大?
(3)细绳恰好伸直后继续向容器内缓慢注水,直到木块刚好全部被水浸没,水面又升高了多少?
如图是利用滑轮组打捞水中物体的简化模型示意图,工人用一滑轮组从水中打捞物体。已知:物体的质量为 且以恒定速度匀速上升,当物体完全露出水面,工人对滑轮组绳子自由端的拉力 为 ,此时滑轮组的机械效率 为 (绳的质量、滑轮与轴的摩擦以及水的阻力均忽略不计, 。
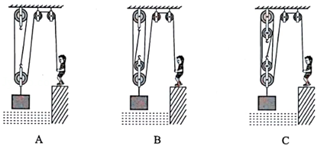
(1)请你根据题目中的条件,判断出工人所使用的滑轮组是下列中的 图。
(2)工人的质量为 ,双脚与地面接触面积为 ,物体浸没在水中和完全被打捞出水面时工人对地面的压强变化了 ,求物体浸没在水中时受到的浮力。
(3)若物体完全浸没在水中时,工人拉力的功率为 ,求物体上升的速度。
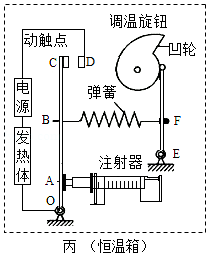
电冰箱是通过温度控制器控制压缩机的开或停来控制温度的。某冰箱的温控制冷和照明电路,如图甲。冰箱内温度控制器工作原理如图乙,硬杆 可绕固定点 转动,感温包内充有感温剂气体,膜盒会因感温包内气体压强的变化而改变对 点的推力大小。

(1)请将答题纸图甲中的 、 、 三个接线头连入家庭电路。
(2)温度控制器接通电路的工作过程是:当感温剂气体温度上升时, ,动触点和固定触点接通,压缩机开始工作。
(3)某同学模拟冰箱温控制冷电路,制作了一个恒温箱,如图丙。恒温箱中温度控制器的轻质硬杆 长为5厘米, 长为12厘米,注射器的最大刻度为30毫升,刻度部分长为10厘米。
|
|
80 |
160 |
240 |
|
|
12.8 |
13.6 |
14.4 |
查阅资料得知,在弹性限度内,弹簧的长度 与所挂钩码质量 的关系遵循函数 和 为常数)。为了确定该弹簧 和 的值,在弹簧上挂钩码测得三组数据如上表。
当设定的温度为 时,弹簧长14厘米,触点 和 恰好接通。请计算此时注射器内气体的压强。(已知当时大气压为 帕)
(4)丙图中,温度控制器硬杆上的连结点 、 、 、 均固定,调温旋钮转轴及触点 也固定,调温旋钮已调到最低温度,在不更换元件的情况下,如何将恒温箱设定温度调节得更低?
 粤公网安备 44130202000953号
粤公网安备 44130202000953号