如图甲所示的钢丝钳,其中A是剪钢丝处,B为手的用力点,O为转动轴(支点),图乙为单侧钳柄及相连部分示意图.请在图乙中画出钢丝钳剪钢丝时的动力臂L1和阻力F2.
如图所示,杠杆是平衡的,如在支点左侧的钩码下再增加一只等重的钩码,要使杠杆重新平衡则 ( )
| A.在右侧钩码下再挂1只等重的钩码 |
| B.将右侧钩码往左移一格 |
| C.将左侧钩码下再挂2只等重的钩码 |
| D.将左侧钩码往右移一格 |
小明用图所示的实验装置探究杠杆的平衡条件: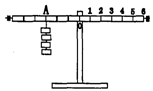
(1)实验前没有挂钩码时,发现杠杆左端下倾,应将杠杆右端螺母向 (左或右)边旋一些,使杠杆在水平位置平衡。
(2)实验时只有8个相同的钩码,杠杆上每格等距,当在A点挂4个钩码时,则怎样挂钩码可以使杠杆在水平位置平衡?(请设计一种方案)
答: .
(3)实验中改变支点两侧的钩码位置和个数,用同样的方法一般要做三次,得到三组数据并进行分析.这样做的目的是 。
(4)在实验中,若保持钩码的只数和位置不变,使弹簧测力计由竖直向下拉改为斜向下拉,则弹簧测力计的示数将 (填“变大”、“变小”或“不变”)
在“探究杠杆的平衡条件”的实验中:
(1)如图a,杠杆上面有刻度,将杠杆的中点置于支架上,当杠杆静止时,如图a,发现杠杆左端下沉,这时应将平衡螺母向 (选填“左”或“右”)端调节,直到杠杆在 位置平衡.
(2)图b和图c的操作相比,图 更方便,因为可以直接读出 .
(3)图d中,若慢慢将弹簧测力计倾斜过来拉杠杆,仍使杠杆在水平位置平衡,它的示数将变 ,因为 .
(4)经过多次实验,得出实验结论后,小明同学想利用图e装置测出杠杆提升钩码时的机械效率:
①图e所示实验中,每个钩码重0.5N,弹簧测力计竖直向上拉杠杆,它的示数为4N,当钩码上升6cm时,杠杆上的C点上升3cm,则此时杠杆的机械效率ηa= .
②杠杆的机械效率跟钩码悬挂的位置到底有没有关系呢?如图f,他仍然竖直向上拉杠杆使C点上升3cm,若支点处的摩擦力可以忽略不计,经分析可知此时杠杆的机械效率ηb与ηa相比 (变大/变小/不变).接下来可以进行实验,收集数据,通过实践证明我们的分析是否正确.
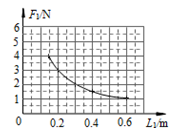
小华通过实验探究杠杆平衡时动力和动力臂的关系.实验过程中,保持阻力、阻力臂不变,在杠杆水平平衡时,测出每一组动力臂L1和动力F1的数据,并利用实验数据绘制了F1与L1的关系图像,如下图所示.请根据图像推算,当L1为0.1m时,F1为 N.
如图所示在用羊角锤拔钉子时,若O为支点,画出在A点施加的最小力F的示意图及其力臂L。
下图是一种抽水马桶的水箱自动上水装置示意图。当水箱内的水达到一定深度时,浮标带动杠杆压住入水口,停止上水。请在图中作出力F1、F2的力臂L1、L2,O为支点。
(1)如图一束光线射到平面镜上,其反射光线与平面镜的夹角是300,如图所示,请画出入射光线并标出入射角大小。
(2)如图是静止在水平地面上的拉杆旅行箱的示意图,O是轮子的转轴,O’是箱体的重心。以O为支点,画出力F的力臂和箱体所受重力的示意图。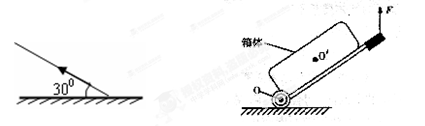
小华和小明一起做探究杠杆平衡条件的实验
(1)实验前,将杠杆的中点置于支架上,当杠杆静止时发现杠杆停在如图甲所示的位置。小华将左端的平衡螺母向右调,小明认为也可以将右端的平衡螺母向 调(选填“右”或“左”),使杠杆在水平位置平衡。他们调节杠杆在水平位置平衡的主要目的是 。

(2)在杠杆的两端加挂钩码,并移动钩码,使杠杆在水平位置平衡,如图乙所示,并测出力臂。多次实验并把数据记录在表格中。
| 次数 |
F1/N |
l1/cm |
F2/N |
l2/cm |
| 1 |
1 |
10 |
2 |
5 |
| 2 |
2 |
10 |
1 |
20 |
| 3 |
2 |
15 |
3 |
10 |
实验时杠杆在水平位置平衡的目的是: ;
多次实验的目的是: 。
(3)小华根据以上数据得出杠杆平衡的条件是: 。
(4)小明将图乙中杠杆两侧的钩码各增加一个,杠杆会 (选填“右侧下降”或“左侧下降”)。
(5)若小华只将图乙中的杠杆左侧的两个钩码取下,要使杠杆重新在水平位置平衡,应将右侧钩码
(说出钩码移动的方向及格数)。
如图所示,在使用相同的钩码进行“探究杠杆的平衡条件”的实验中,要使调好的杠杆重新在水平位置平衡,应在A处悬挂钩码的个数是( )
| A.1个 | B.2个 | C.3个 | D.6个 |
如图,质量忽略不计的硬棒OB,可以绕固定在墙上的O点转动,B端挂一盏电灯,通过系在A点的线绳将硬棒OB固定.请画出动力F1、动力臂L1和电灯的重力G.



 粤公网安备 44130202000953号
粤公网安备 44130202000953号