将重为5N和15N的甲、乙两物体,分别挂在杠杆的左右两端。若杠杆的重力忽略不计,当杠杆平衡时,左右两边臂长之比为
| A.3:1 | B.2:1 | C.1:3 | D.4:1 |
如图甲所示,一根木棒用细线系着悬挂在天花板上,木棒一端吊着一个质量为m的重物.为了使木棒能在图中所示的位置静止,必须给它施加一个力的作用.请你画出施加的最小力的示意图.
下图所示是一种新型圆规。它一脚的末端装有吸盘,是利用________的作用将其固定在黑板上的,另一脚末端的粉笔通过螺母固定。作图时,转动手柄便可在黑板上画出漂亮的圆,圆规在使用过程中相当于简单机械中的________(填“省力”或“费力”)杠杆。
在探究杠杆平衡条件的实验中
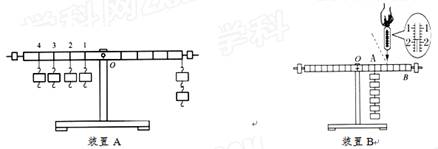
(1)杠杆的平衡状态是指杠杆处于 或匀速转动状态.实验前没有挂钩码时,调节平衡螺母,使杠杆在 平衡,其主要目的是消除杠杆自重对实验的影响.
(2)实验中,用装置A的方式悬挂钩码,杠杆也能水平平衡(杠杆上每格等距),但老师建议学生不宜采用这种方式,该种方式的不足主要是因为 ( )
| A.一个人无法独立操作 |
| B.力臂与杠杆不重合 |
| C.力和力臂数目过多,不易得出结论 |
| D.杠杆受力不平衡 |
(3)若用装置B进行实验,则此时弹簧测力计的示数是 N;将弹簧测力计沿虚线方向拉,仍然使杠杆在原来的位置平衡,此时拉力的力臂将 ,弹簧测力计的示数将 (选填“变大”、“变小”或“不变”).
用动力臂是阻力臂3倍的杠杆将货物抬高30㎝,手下降的高度是 cm,小明根据杠杠的平衡条件算出手向下的力为200N, 但是经过测量手向下压杠杆的力实际为250N,人做的总功是 J,有用功是 J,这根杠杆的机械效率是 .
如图所示,某小组研究“杠杆的平衡条件”,器材:有刻度的杠杆、若干个相同的钩码、弹簧测力计等,O为杠杆的支点。

(1)实验前,应先调节杠杆在 位置平衡,这样做,除了可以消除自身的重力影响,还可以方便实验时测量或直接读出 。调节时,如发现杠杆左端偏高,应如何操作 。
(2)某实验小组记录两组数据如下:
| 实验序号 |
动力F1/N |
动力臂l1/cm |
阻力F2/N |
阻力臂l2/cm |
| 1 |
2 |
20 |
1 |
10 |
| 2 |
1 |
8 |
2 |
4 |
据分析这组数据中,实验序号为 (选填:“1”或“2”)的一组肯定有错误,检查发现是测量动力臂时读错了,动力臂的实际值比记录值 (选填:“大”或“小”)。
如图所示,用一根硬棒撬一个大石块,棒的上端A是动力作用点。(3分)
(1)在图上标出:当动力方向向上时,杠杆的支点a;当动力方向向下时,杠杆的支点b。
(2)画出撬动石块动力F为最小时的方向。
在探究杠杆平衡条件的实验中,使杠杆在水平位置平衡,目的是 。图甲中,为使杠杆在水平位置平衡,需要在B处挂 个相同的钩码;图乙中,弹簧测力计倾斜后(杠杆仍在水平位置平衡),其示数将 (填“变大”、“不变”或“变小”)。
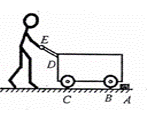
如图所示是列车上常用的手推车,车内货物均匀摆放。车前行时,需经过障碍物。当车的前轮遇到障碍物A时,售货员向下按扶把,这时手推车可以视为杠杆,若手推车和货物总重200N,动力臂和阻力臂之比为2:3,则服务员作用在扶把上的动力为 N。当后轮遇到障碍物A时,售货员竖直向上提扶把,这时支点是 (选填“A”、“B”或“C”)点。
如图所示,小明同学设计了一个简易按摩棒,其结构可以看作是一个杠杆。ABO为一根弹性细杆,O为支点,B处固定一个条形磁体,A为按摩槌头。当螺线管内输入方向改变的交流电时,条形磁体会受到通电螺线管的引力或斥力带动按摩槌头A振动敲击人体穴位。某一时刻,电磁铁与条形磁体间的磁感线如图所示,槌头A向下振动。请画出此时:(1)槌头所受阻力F及力臂L;(2)通电螺线管电源的正、负极。
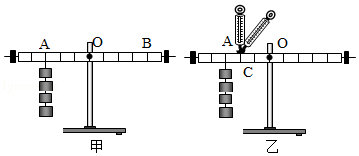
物理兴趣小组的同学,利用如图所示的装置,来“探究杠杆的平衡条件”。
(1)在实验前应调节杠杆两端的平衡螺母,使杠杆在水平位置平衡,这样做的好处是_______;若实验前杠杆如图甲所示,可将杠杆两端的平衡螺母向_______(填“左”或“右”)调节,以使杠杆在水平位置平衡。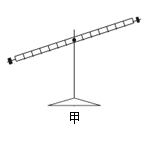
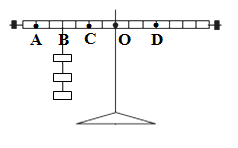
(2)调节完毕后,当在杠杆B点挂3个质量相同的钩码,如图乙所示,那么在杠杆的D点挂_______个质量相同的钩码,才能使杠杆恢复在水平位置平衡。当杠杆平衡后,将B、D两点下方所挂的钩码同时向支点O靠近1个格,那么杠杆_______(填“能”或“不能”)在水平位置保持平衡。
(3)实验中若不在D点挂钩码,而在杠杆的A点或C点使用弹簧测力计使杠杆在水平位置平衡,为使弹簧测力计的示数最小,应使弹簧测力计挂在______点,且拉力的方向是_______。
如图所示,是“探究杠杆平衡条件”的装置图。

(1)实验前为方便测量力臂长度,应将杠杆调节到 平衡,如果杠杆的左端向下倾斜,平衡螺母应向 端调节。
(2)实验记录的数据如表所示,收集多组数据的目的是 ;实验得到的结论是 (用字母符号表示)。
| 实验次数 |
动力F1/N |
动力臂L1/cm |
阻力F2/N |
阻力臂L2/cm |
| 1 |
0.5 |
10 |
1 |
5 |
| 2 |
0.5 |
15 |
1.5 |
5 |
| 3 |
1.5 |
20 |
3 |
10 |
| 4 |
2 |
20 |
4 |
10 |
(3)图中杠杆处于平衡状态,每个钩码受到的重力是0.5N,则弹簧测力计竖直向下的拉力是 N;拉着弹簧测力计,逐渐向右倾斜,并保持杠杆平衡,弹簧测力计的示数将 。
在"探究杠杆平衡条件"的实验中:

(1)实验前,若使如图1所示的杠杆在水平位置平衡,应将右端的平衡螺母向 (选填"左"或"右" 调节。
(2)实验时,在已调平衡的杠杆两侧分别挂上不同数量的钩码,移动钩码位置,使杠杆重新在水平位置平衡,三次实验获得的数据如表所示。分析可得杠杆的平衡条件是 。
| 次数 |
动力 |
动力臂 |
阻力 |
阻力臂 |
| 1 |
1.0 |
15.0 |
1.5 |
10.0 |
| 2 |
1.0 |
20.0 |
2.0 |
10.0 |
| 3 |
2.0 |
15.0 |
3.0 |
10.0 |
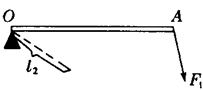
(3)为了进一步验证实验结论,又做了如图2所示的实验,在杠杆水平平衡时:
①已知每个钩码的质量均为 ,则此次实验中阻力 大小为 ,阻力臂 为 ; 取
②请你在图中画出动力 的力臂。

 粤公网安备 44130202000953号
粤公网安备 44130202000953号