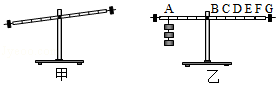
如图甲所示,小明在探究“杠杆的平衡条件”实验中所用的实验器材有:杠杆、支架、弹簧测力计、刻度尺、细线和质量相同的钩码若干个。
(1)实验前,将杠杆中点置于支架上,当杠杆静止时,发现杠杆右端下沉。此时,应把杠杆两端的平衡螺母向 (选填“左”或“右”)调节。
(2)如图甲所示,在杠杆左边A处挂四个相同钩码,要使杠杆在水平位置平衡,应在杠杆右边B处挂同样钩码 个。


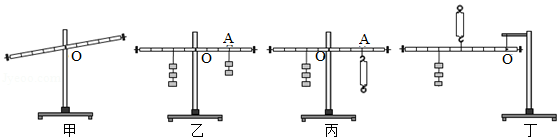
(3)如图乙所示,用弹簧测力计在C处竖直向上拉,当弹簧测力计逐渐向右倾斜时,使杠杆仍然在水平位置平衡,则弹簧测力计的示数将 (选填“变大”、“变小”或“不变”),其原因是 。
(4)实验结束后,小明提出了新的探究问题:“若支点不在杠杆的中点时,杠杆的平衡条件是否仍然成立?”于是小组同学利用如图丙所示装置进行探究,发现在杠杆左端的不同位置,用弹簧测力计竖直向上拉使杠杆处于水平平衡状态时,测出的拉力大小都与杠杆平衡条件不相符。其原是: 。
在学习了支点、动力、阻力概念后,甲、乙两小组继续研究动力对杠杆平衡的影响。他们将一个玩具“海宝”固定在杠杆一端的B点作为阻力,且保持阻力的大小、方向、作用点都不变,在杠杆的另一端用力使杠杆在水平位置平衡,并用测力计测出动力的大小。实验中,甲小组每次都保持动力在竖直方向、只改变动力作用点的位置,分别如图(a)所示;乙小组每次都保持动力作用点的位置不变、改变动力的方向(“动力的方向”用OA连线跟动力方向的夹角θ表示,且0°<θ≤90°),分别如图(b)所示;表一、表二是两小组同学记录的实验数据。
| 表一 甲小组 |
表二 乙小组 |
||||||
| 实验 序号 |
支点到动力作用点的距离 S (厘米) |
动力的方向(夹角θ) |
动力的大小(牛) |
实验 序号 |
支点到动力作用点的距离 S (厘米) |
动力的方向 (夹角θ) |
动力的大小(牛) |
| 1 |
5 |
90° |
6 |
4 |
15 |
30° |
4 |
| 2 |
10 |
90° |
3 |
5 |
15 |
45° |
2.8 |
| 3 |
15 |
90° |
2 |
6 |
15 |
90° |
2 |
(1)分析比较表一中第 列和第 列的实验数据可知:作用在杠杆一端的阻力不变时,要使杠杆平衡,在动力方向不变(θ=90°)的情况下,支点到动力作用点的距离S越大,动力越小。
(2)分析比较表二中第三列与第四列的实验数据可知:作用在杠杆一端的阻力不变时,要使杠杆平衡,在动力作用点不变的情况下, ______ _____。
(3)进一步分析图(b)所示的实验现象及表二中的实验数据,可以发现,作用在杠杆一端的阻力不变时,要使杠杆平衡,当动力作用点不变,动力的方向改变以后,动力的大小与____________ ____有关,且成反比关系。
(4)进一步综合分析表一与表二中的实验数据及相关条件,可得出的初步结论是:作用在杠杆一端的阻力不变时,影响杠杆平衡的因素是__ _和__ ___。
小华和小明一起做探究杠杆平衡条件的实验
(1)实验前,将杠杆的中点置于支架上,当杠杆静止时发现杠杆停在如图甲所示的位置。小华将左端的平衡螺母向右调,小明认为也可以将右端的平衡螺母向 调(选填“右”或“左”),使杠杆在水平位置平衡。他们调节杠杆在水平位置平衡的主要目的是 。

(2)在杠杆的两端加挂钩码,并移动钩码,使杠杆在水平位置平衡,如图乙所示,并测出力臂。多次实验并把数据记录在表格中。
| 次数 |
F1/N |
l1/cm |
F2/N |
l2/cm |
| 1 |
1 |
10 |
2 |
5 |
| 2 |
2 |
10 |
1 |
20 |
| 3 |
2 |
15 |
3 |
10 |
实验时杠杆在水平位置平衡的目的是: ;
多次实验的目的是: 。
(3)小华根据以上数据得出杠杆平衡的条件是: 。
(4)小明将图乙中杠杆两侧的钩码各增加一个,杠杆会 (选填“右侧下降”或“左侧下降”)。
(5)若小华只将图乙中的杠杆左侧的两个钩码取下,要使杠杆重新在水平位置平衡,应将右侧钩码
(说出钩码移动的方向及格数)。
罗珍和丹珍用图甲所示的杠杆一起探究杠杆的平衡条件:
(1)实验前,应使甲图中的杠杆在______位置平衡,可以杠杆左端的平衡螺母向____调,或将右端的平衡螺母向____调;调平衡后,丹珍在乙图所示位置处挂上3个钩码,要使杠杆在水平位置平衡,应在杠杆右端的_____点挂上2个钩码。
(2)如乙图,用弹簧测力计在M位置和N位置用力使杠杆在水平位置处于平衡,弹簧测力计的示数将会变________,这是因为______________________________________。
(14分)小明在探究“杠杆的平衡条件”实验中所用的实验器材有:杠杆、支架、弹簧测力计、刻度尺、细线和质量相同的钩码若干个。
(1)实验前,将杠杆中点置于支架上,当杠杆静止时,发现杠杆右端下沉。此时,应把杠杆两端的平衡螺母向 (选填“左”或“右”)调节,使杠杆在不挂钩码时,保持 并静止。
(2)杠杆调节平衡后,小明在杠杆上A点处挂4个钩码(如图甲所示)为了使杠杆仍在水平位置平衡,他可以在B点处挂 个钩码或用弹簧测力计拉杠杆;若在B点采用弹簧测力计拉的方法,则弹簧测力计拉力的方向最好为 ,其目的是 ;且在使用前弹簧测力计须在 (正立\倒立)方向上校零。
(3)实验结束后,小明提出了新的探究问题:“若支点不在杠杆的中点时,杠杆的平衡条件是否仍然成立?”于是小组同学利用如图乙所示装置进行探究,发现在杠杆左端的不同位置,用弹簧测力计竖直向上拉使杠杆处于平衡状态时,测出的拉力大小都与杠杆平衡条件不相符。其原因是: 。
我班物理兴趣小组的同学,利用如图所示的装置,在杠杆支点的两边分别挂上钩码来探究杠杆的平衡条件.(每空1分,共6分)
| 测量 序号 |
动力 F1/N |
动力臂 l1/cm |
阻力 F2/N |
阻力臂 l2/cm |
| ① |
1 |
20 |
2 |
10 |
| ② |
2 |
15 |
1.5 |
20 |
| ③ |
3 |
5 |
|
15 |
(1)若杠杆静止在如图甲所示的位置,此时杠杆平衡吗?_________(选填“平衡”或“不平衡”)
(2)为尽量减小杠杆自身的__________对实验结果的影响,应使杠杆在水平位置平衡,如图甲中,应将右端的平衡螺母向_________(选填“左”或“右”)调节;将杠杆调在水平位置平衡还可以方便的测量__________.
(3)实验中测得的数据如表所示,表格中漏填的数据为________N.
(4)有的同学按现有方案得出如下结论:“动力×支点到动力作用点的距离=阻力×支点到阻力作用点的距离”.这个结论与杠杆平衡条件不符,为解决本实验方案的这一不足,小刚同学用弹簧测力计替换了一组钩码,并使测力计的拉力方向 _________________,使杠杆平衡,再做几组实验,即可得到验证。
在探究杠杆的平衡条件的实验中,
(1)如图甲所示,为了使杠杆在水平位置平衡,应该向 移动右端的螺母(选填“左”或“右”)。
(2)实验时只有10个相同的钩码,杠杆上每格等距,当在A点挂3个钩码时,如图乙所示,则怎样挂钩码可以使杠杆在水平位置平衡?(请设计两种方案)
① ;
② 。
(3)通过对实验数据进行分析处理,可得出结论:杠杆平衡条件是 。
如图示,某小组研究“杠杆的平衡条件”,器材:有刻度的杠杆、若干个相同的钩码、弹簧测力计等,O为杠杆的支点。
①实验前,应先调节杠杆在 位置平衡。这样做,除了可以消除自身的重力影响,还可以方便地测量或读出 。调节时,如发现杠杆左端偏高,应如何操作: 。
②某实验小组记录两组数据如下:
| 实验序号 |
动力F1/N |
动力臂l1/cm |
阻力F2/N |
阻力臂l2/cm |
| 1 |
2 |
20 |
1 |
10 |
| 2 |
1 |
8 |
2 |
4 |
根据分析,这组数据中,实验序号为 (选填:“1”或“2”)的一组肯定有错误。检查发现是测量动力臂时读错了,动力臂的实际值比记录值 (选填:大或小)。
③如图所示,弹簧测力计在C处由竖直向上逐渐向右倾斜拉动杠杆,仍使杠杆在水平位置保持平衡,则弹簧测力计的示数将 (选填:“变大”、“变小”或“保持不变”),其原因是 。
④某次实验中,若采取如图所示的方式悬挂钩码,杠杆也能在水平位置保持平衡(杠杆上每格等距),但老师却往往提醒大家不要采用这种方式,这主要是以下哪种原因 (选填字母)。
A.一个人无法独立操作 B.需要使用太多的钩码
C.力臂与杠杆不重合 D.力和力臂数目过多
⑤如图所示,实验小组选用长1.6m、粗细均匀的一只金属杆,绕O点在竖直平面内自由转动,同时将一个“拉力——位移传感器”竖直作用在杆上,并使杠杆在水平位置始终保持平衡。该传感器显示其拉力F与作用点到O点距离x的变化关系如图15所示。由图可知金属杆重 N。
如图甲所示,小明在探究“杠杆的平衡条件”实验中所用的实验器材有:杠杆、支架、弹簧测力计、刻度尺、细线和质量相同的钩码若干个.
(1)实验前,将杠杆中点置于支架上,当杠杆静止时,发现杠杆右端下沉,此时,应把杠杆两端的平衡螺母向 (选填“左”或“右”)调节,使杠杆在不挂钩码时,保持在 位置静止,达到平衡状态。这样做的好处是:便于在杠杆上直接测量 .
(2)杠杆调节平衡后,小明在杠杆上A点处挂4个钩码,在B点处挂6个钩码,杠杆恰好在原位置平衡.于是小明便得出了杠杆的平衡条件,他这样得出的结论是否合理? ;为什么? .
(3)实验结束后,小明提出了新的探究问题:“若支点不在杠杆的中点时,杠杆的平衡条件是否仍然成立?”于是小组同学利用如图乙所示装置进行探究,发现在杠杆左端的不同位置,用弹簧测力计竖直向上拉使杠杆处于平衡状态时,测出的拉力大小都与杠杆平衡条件不相符,其原因是: .
在"探究杠杆平衡的条件"实验中,需记录动力、动力臂、 和阻力臂,为便于直接在杠杆上读出力臂的数值,应使杠杆在 位置保持平衡。在"探究平面镜成像的特点"实验中,为了能够找到 像的位置 (选填"实"或"虚"),采用 作为平面镜。
学习了杠杆原理后,小明和小王同学尝试利用杠杆原理测量出一把直尺的质量mR.请你也参与到他们的活动中吧,实验步骤如下:
(1)找出直尺的重心,如图所示,他们将刀口仰放在桌子上,再把直尺平放在刀口(支点)上,左右移动直尺,使直尺在水平位置保持静止,此时 的位置在直尺重心的正下方.他们在重心处做好记号.
(2)将质量是m千克的钩码挂在刀口左端的直尺上某一位置,在刀口上向右移动直尺,使其重新在 位置平衡,读出此时钩码到刀口的距离,此距离就是动力臂l1,直尺重心到刀口的距离就视为阻力臂l2.
(3)用上述已知的量和测量的量可写出计算直尺质量的表达式为m尺= .
在“探究杠杆的平衡条件”实验中,应先调节杠杆两端的平衡螺母,使杠杆在水平位置平衡,这样做的目的是为了使杠杆的 在支点上;挂上钩码后再调节钩码的位置,使杠杆在水平位置平衡,目的是 
上图是小明同学三次实验的情景,实验时所用的每个钩码重0.5N,杠杆上每一格长5cm,部分实验数据已记录在下表中.
| 实验次数 |
动力F1 / N |
动力臂L1 / cm |
阻力F2 / N |
阻力臂L2 / cm |
| 1 |
1.5 |
10 |
1 |
|
| 2 |
1 |
20 |
|
10 |
| 3 |
1 |
20 |
1.5 |
10 |
(1) 将表格中的实验数据补充完整.
(2) 小明的第3次实验存在错误,其错误是________________________________.
(3) 实验中多次测量的目的是_____________________________________.
在探究“杠杆平衡条件”的实验中,采用了如图甲所示的实验装置:
(1)实验前,小明同学发现实验装置处于如图甲所示的状态,使用时,首先应将杠杆两端的平衡螺母向 (选填“左”或“右” 调节,使杠杆在水平位置平衡,这样做的好处是 ;
动力 |
动力臂 |
阻力 |
阻力臂 |
2 |
5 |
5 |
2 |
3 |
6 |
6 |
3 |
4 |
2 |
2 |
4 |
3 |
4 |
2 |
6 |
3 |
6 |
9 |
2 |
4 |
4 |
2 |
8 |
(2)一实验小组在正确操作过程中,得出的实验数据如上表。小明同学分析实验数据后认为杠杆平衡的条件是:动力 动力臂 阻力 阻力臂;小华同学分析实验数据后认为杠杆平衡的条件是:动力 动力臂 阻力 阻力臂。两个同学都认为自己是对的,对方是错误的。那么你认为他们中正确的应该是 同学。原因是 ;
(3)把图乙中 点的钩码取下,在 点用弹簧测力计施加一个竖直向下的拉力 时,杠杆仍能在水平位置平衡,如图丙所示。当拉力 向左倾斜时,要保持杠杆仍在水平位置平衡,则拉力 将 (选填“变大”、“变小”或“不变” ;
(4)小红同学采用了图丁所示的装置进行探究,发现当杠杆水平平衡时,与其他同学得出的正确的杠杆平衡条件不相符,其可能的原因是 。
某同学用如图所示装置做探究杠杆平衡条件的实验,图中杠杆匀质且标有均匀刻度。实验前发现右端偏高,应向 端调节平衡螺母使杠杆在水平位置平衡;当杠杆水平平衡后,在左侧第2格上挂3个相同的钩码,则应在右侧第3格上挂 个相同的钩码才能使杠杆水平平衡;若在右侧改用弹簧测力计向下拉,弹簧测力计由竖直方向逐渐向左转动,杠杆始终保持水平平衡,则弹簧测力计的示数将逐渐 (选填“增大”、“减小”、“不变”或者“不确定”)。

 粤公网安备 44130202000953号
粤公网安备 44130202000953号