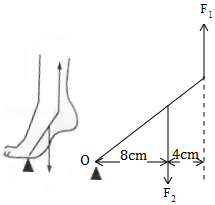
O为支点的轻质杠杆原处于水平静止,现同时施加大小相等的力F 1、F 2(如图)。
(1)此时杠杆能否保持平衡? 。
(2)画出图中F 1的力臂L 1。

现有两个品种相同的实心西瓜,形状不同,在没有直接测量质量和重力工具的情况下,要判断哪个更重,在以下三种方案中
方案一:将西瓜分别装入相同的网,分别挂在已调节好的等臂杠杆的两端,观察杠杆的倾斜情况;
方案二:将西瓜分别装入相同的网,分别系在一条跨过定滑轮的绳子两端,向上提滑轮,观察哪个先离开地面;
方案三:把两个西瓜放在质地均匀的同一块海绵上,观察海绵形变的大小。
你认为方案 不可行,原因是 。
如图,轻质杠杆AB可以绕O点转动,OB=3OA,B端细线下挂100N的重物G静止在水平地面上。若要使杠杆在水平位置保持平衡,且重物G对水平地面的压力刚好为零。则正确的是( )

A.在A点要用200N的力向下拉
B.若将A和B同时向O点移动相同距离,杠杆仍能在水平位置保持平衡
C.此杠杆类型与吃饭用的筷子相同
D.在A点拉力不变时,只将A点向O移动,重物G对地面的压强不会改变
小军发现一个质量为  、不吸水的新型圆台体建筑材料,他只有量程为
、不吸水的新型圆台体建筑材料,他只有量程为  的弹簧测力计,设计了如图所示装置进行实验。重为
的弹簧测力计,设计了如图所示装置进行实验。重为  、底面积为
、底面积为  的薄壁容器
的薄壁容器  内盛有
内盛有  的水,容器
的水,容器  置于水平地面,当轻质杠杆在水平位置平衡时竖直向上的拉力
置于水平地面,当轻质杠杆在水平位置平衡时竖直向上的拉力  为
为  ,此时材料浸没在水中静止且未触底。求:
,此时材料浸没在水中静止且未触底。求:
(1)材料受到的重力;
(2)材料未放入前容器对水平地面的压强;
(3)材料的密度。

如图所示,由不同物质制成的甲和乙两种实心球的体积相等,此时杠杆平衡(杠杆自重、挂盘和细线的质量忽略不计),则杠杆左右两边的力臂之比为 ,1个甲球和1个乙球的质量之比为 ,甲球和乙球的密度之比为 。

骨胳、肌肉和关节构成了人体的运动系统,最基本的运动都是肌肉牵引骨胳绕关节转动产生的,其模型就是杠杆。如图所示是踮脚时的示意图,人体的重力为阻力,小腿肌肉施加的拉力为动力。重 的小明在 内完成50个双脚同时踮起动作,每次踮脚过程中脚跟离开地面的高度是 。求:
(1)小腿肌肉对每只脚的拉力;
(2)小明踮脚过程中克服重力做功的功率。
用如图所示的几种简单机械提起相同重物G,机械自重不可忽略,不考虑摩擦,则最小的力是( )
A. B.
B.
C. D.
D.
如图所示,将一薄木尺的 长度用多层报纸紧密地覆盖在水平桌面上(桌面与报纸之间几乎没有空气),已知报纸的上表面积为 .则大气对报纸上表面的压力为 ;在木尺右端快速施加竖直向下的力 ,要将报纸掀开,则力 至少为 (假设报纸不破损,报纸对木尺的压力全部作用在木尺最左端,大气压取 ,报纸和薄木尺的重力忽略不计)。

如图所示,是我国古代《墨经》最早记述了秤的杠杆原理,有关它的说法正确的是

| A. |
"标"、"本"表示力,"权"、"重"表示力臂 |
| B. |
图中的 点为杠杆的支点 |
| C. |
"权"小于"重"时, 端一定上扬 |
| D. |
增大"重"时,应把"权"向 端移 |
如图,装满物品的拉杆式旅行箱总重  ,其重心在箱体的几何中心,图中
,其重心在箱体的几何中心,图中  与
与  等长。现将平放在水平地面上的该旅行箱的
等长。现将平放在水平地面上的该旅行箱的  端抬离地面,至少用力
端抬离地面,至少用力  ,拉杆越短,所需的力越 。
,拉杆越短,所需的力越 。

杠杆是我们生活中一种常见的简单机械,如图所示,轻质杠杆OA可绕O点无摩擦转动,A点悬挂一个重为20N的物体,B点施加一个竖直向上的拉力F,使杠杆在水平位置平衡,且OB:AB=2:1。则F= N,此杠杆是 杠杆。

解放前,我国经济很落后,一些地区过着极其原始的生活。如图所示,就是为了解决饮水问题,需要到很远地方挑水的示意图。为了防止道路不好水溅出桶外,在水面上覆盖木板(如图),若一个木板质量为 ,密度为 ,每个桶内水深 ,求:
(1)桶底受到的水产生的压强;
(2)一个木板受到的浮力及静止时露出水面的体积;
(3)扁担与绳质量忽略不计,扁担长度 ,每桶水总重 ,扁担与肩膀接触点距离扁担右端 ,支撑手距离扁担左端也是 ,则支撑手受到的扁担产生的压力。

如图所示,小轿车的方向盘相当于一个轮轴,若 ,盘的半径为 ,轴的直径为 ,不计摩擦阻力,则 .门锁的把手相当于一个 (选填“省力”或“费力” 轮轴。

如图所示,杠杆 用细线悬挂起来,分别在 、 两端分别挂上质量为 、 的重物时,杠杆平衡,此时 恰好处于水平位置, ,不计杠杆重力,则 、 的关系为

A. B. C. D.无法判断

 粤公网安备 44130202000953号
粤公网安备 44130202000953号