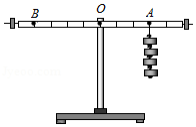
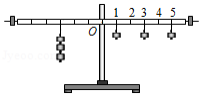
在探究杠杆平衡条件的实验中,某同学发现杠杆左端低右端高,要使杠杆在水平位置平衡,应将杠杆左端的平衡螺母向 (选填“内”或“外” 调节;在杠杆的右边 处挂4个质量均为 的砝码,如图所示,要使杠杆在水平位置平衡,应在杠杆左边的 处竖直向下用 的力来拉 。
小明利用杠杆做了以下实验,实验时使用的每个钩码的质量均相等,杠杆上相邻刻线间的距离相等,请回答下列问题:
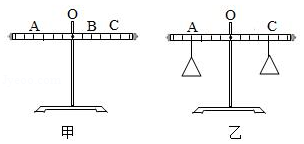
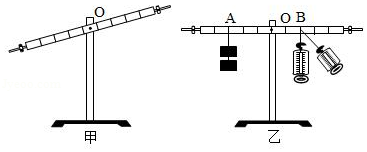
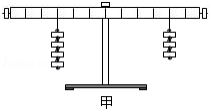
(1)如图甲所示,将杠杆中点置于支架上,当杠杆静止时,发现杠杆的左端下沉,若想使杠杆在水平位置平衡,应将杠杆的平衡螺母向 调节。杠杆在水平位置平衡后,在 点悬挂2个钩码,要使杠杆在水平位置再次平衡,需在 点悬挂 个钩码;之后在 、 两点再各增加1个钩码,杠杆将 (选填“不动”、“顺时针旋转”或“逆时针旋转”)。
(2)如图乙所示,小明在 、 两点分别悬挂等重的载物盘,制作了一个天平,左盘盛放物体,右盘加减砝码,此天平是利用了哪一类杠杆制作而成的? 。
(3)小明正确使用自制天平称量物体质量时:
①假如支点 因某种原因向右偏移,则测量值 真实值(选填“大于”“等于”或“小于”);
②假如砝码因生锈等原因质量增大,则测量值 真实值(选填“大于”“等于”或“小于”)。
下面是小聪利用刻度均匀的匀质杠杆进行探究“杠杆平衡条件”的实验。
(1)实验前为方便测量力臂,应将杠杆调节到 位置平衡,将杠杆的中点置于支架上,当杠杆静止时,发现杠杆左端下沉,这时应将平衡螺母向 (选“左”或“右”)端调节。
(2)调节平衡后,在杠杆 点处挂6个钩码,如图甲所示,则在 点处应挂 个同样的钩码,杠杆仍然在水平位置平衡。
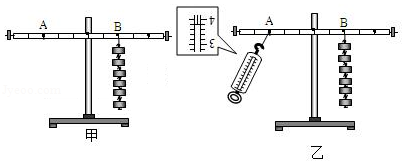
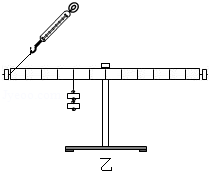
(3)图乙是小聪利用弹簧测力计做的某次实验情景,已知杠杆每格长 ,钩码每个重 ,请将弹簧测力计的示数填入下表。
实验序号 |
动力 |
动力臂 |
阻力 |
阻力臂 |
1 |
|
0.15 |
3.0 |
0.10 |
上述实验数据不符合杠杆平衡条件,出现问题的原因是 。
探究杠杆的平衡条件。
(1)实验前 |
|
杠杆静止在如图所示的位置,要使杠杆在水平位置平衡,应将平衡螺母向 调节。 |
||||||||||||||||||||||||||||
(2)实验时 |
|
①用如图所示的方式悬挂钩码,杠杆也能在水平位置平衡(杠杆上每格等距),但老师却往往提醒大家不要采用这种方式。这主要是因为该种方式 。 .一个人无法独立操作 .需要使用太多的钩码 .无法测量力臂 .力和力臂数目过多 ②在图中,不改变支点 左侧所挂的三个钩码及其位置,保持右侧第 格的钩码不动,将右侧另外两个钩码改挂到它的下方,杠杆也可平衡,继续实验。 |
||||||||||||||||||||||||||||
实验数据:
|
||||||||||||||||||||||||||||||
(3)结论 |
杠杆的平衡条件是: 。 |
|||||||||||||||||||||||||||||
(4)交流评估 |
①实验进行三次的目的是 (只有一个选项正确,填写对应字母)。 .取平均值减小误差 .归纳出物理规律 .使每组数据更准确 ②某同学在第3次实验的基础上,将左右两侧的钩码同时向支点 移动 ,则杠杆 。(选填“保持平衡”“左侧下沉”或“右侧下沉”) |
|||||||||||||||||||||||||||||
如图所示是小李和小王利用刻度均匀的轻质杠杆探究“杠杆平衡条件”的实验装置。
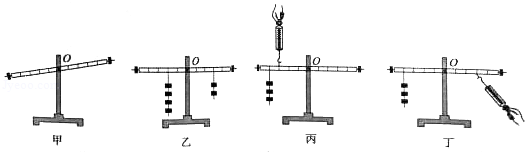
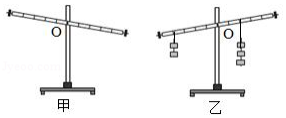
(1)实验前没挂钩码时,杠杆静止的位置如图甲所示,此时应将螺母向 调节,使杠杆在水平位置平衡。
(2)杠杆平衡后,小李在左右两侧分别挂上钩码,如图乙所示,杠杆的 端会下沉,要使杠杆重新在水平位置平衡,在不改变钩码悬挂点的位置和改变较少钩码的前提下,只需将 即可。
(3)小李和小王又分别设计了两种实验方案,小李的方案如图丙所示,小王的方案如图丁所示。你认为 的实验方案更好,请说明你的理由 。
(4)实验中小王发现:如果在杠杆的 点用弹簧测力计施加一个向上的力,这个力在探究实验时是否影响到杠杆的平衡?请说明理由 。
实验探究:探究杠杆的平衡条件
数据 |
如图甲,利用钩码和刻度尺测量出杠杆平衡时各个力及其力臂,测得数据如下表:
|
||||||||||||||||||||
结论 作图 |
①杠杆的平衡条件是 。 ②实验进行3次的目的是 (只有1个选项正确,填写对应字母)。 .取平均值减小误差 .使每组数据更准确 .归纳出物理规律 ③如图乙,若用弹簧测力计的拉力作动力,进行实验,请画出其动力臂。
|
小明在“研究杠杆平衡条件”的实验中所用的实验器材有,刻度均匀的杠杆、支架、弹簧测力计、刻度尺、细线和质量相同的 重的钩码若干个。

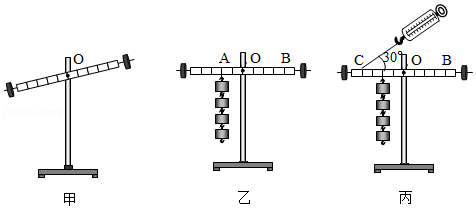
(1)如图 所示,实验前,杠杆左端下沉,则应将左端的平衡螺母向 (选填“左”或”右” 调节,直到杠杆在 位置平衡,目的是便于测量 ,支点选在杠杆的中点是为了消除杠杆 对平衡的影响。
(2)小明同学所在实验小组完成某次操作后,实验现象如图 所示,他们记录的数据为动力 ,动力臂 ,阻力 ,则阻力臂 。
(3)甲同学测出了一组数据后就得出了“动力 动力臂 阻力 阻力臂”的结论,乙同学认为他的做法不合理,理由是 。
(4)丙同学通过对数据分析后得出的结论是:动力 支点到动力作用点的距离 阻力 支点到阻力作用点的距离,与小组同学交流后,乙同学为了证明丙同学的结论是错误的,他做了如图 的实验,此实验 (选填“能”或”不能” 说明该结论是错误的,图 实验中,已知杠杆上每个小格长度为 ,每个钩码重 ,当弹簧测力计在 点斜向上拉(与水平方向成 角)杠杆,使杠杆在水平位置平衡时,动力 动力臂 (选填“等于”或“不等于” 阻力 阻力臂。
在“探究杠杆平衡条件”实验时,实验中所用钩码的质量均为 。
(1)实验前,应先调节杠杆在水平位置平衡。若向右调节杠杆两端的 时,可使杠杆在水平位置平衡,则调节前,杠杆 (选填“左”或“右” 端偏低;
(2)如图甲,当在杠杆左侧第2格处挂6个钩码,在右侧第3格处挂 个钩码(图中右侧钩码未画出)的时候,杠杆在水平位置平衡。此时,若将杠杆左右两侧所挂的钩码各向远离支点 的方向移动1个格,则杠杆 (选填“左”或“右” 端将下降;
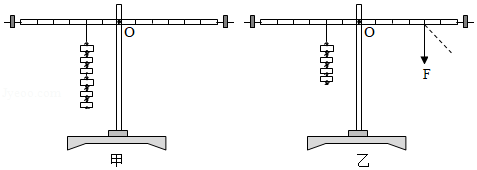
(3)如图乙,当在杠杆左侧第2格处挂4个钩码,在杠杆的右侧用竖直向下的拉力 作用时,杠杆在水平位置平衡。若使杠杆继续在水平位置保持平衡,将拉力方向旋转到图中虚线位置时,拉力 的力臂将 ,拉力 的大小将 (两空都选填“变大”、“变小”或“不变” 。
小张在探究“杠杆平衡条件”实验中,给他提供的实验器材有:杠杆、支架、弹簧测力计、刻度尺、细线和质量相同的钩码若干个。
(1)实验前,将杠杆中点置于支架上,当杠杆静止时,如图所示,此时应把杠杆左端的平衡螺母向 (选填“左”成“右” 调节;
(2)小张将实验数据记录在表中:
次数 |
动力 |
动力臂 |
阻力 |
阻力臂 |
1 |
1 |
10 |
2 |
5 |
2 |
1.5 |
5 |
0.5 |
15 |
3 |
2 |
15 |
1.5 |
▲ |
表格中空缺的实验数据“▲”是 。
(3)小张在实验中多次改变力和力臂的大小主要是为了 (只有一个正确答案,选填答案序号)。
①减小摩擦 ②多次测量取平均值减小误差
③使每组数据更准确 ④获取多组实验数据归纳出物理规律。

小华在做“探究杠杆平衡条件”实验的装置如图,杠杆上相邻刻线间的距离相等。
(1)杠杆在如图甲的位置静止时 (选填“是”或“不是” 处于杠杆平衡状态的。
(2)为使杠杆在水平位置平衡,应将平衡螺母向 (选填“左”或“右” 端调节。
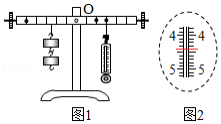
(3)如图乙,杠杆在水平位置平衡后,在 点挂两个钩码,每个钩码重 ,在 点竖直向下拉弹簧测力计,仍使杠杆水平位置平衡,此时弹簧测力计的示数应为 .当弹簧测力计改为斜拉时,再次使杠杆水平位置平衡,则弹簧测力计的示数将 。(选填“变大”、“变小”或“不变”
(4)小华改变钩码的个数和位置进行了多次实验,其目的是 。
在“探究杠杆的平衡条件”实验中,实验前杠杆静止时的位置如图(甲 所示,应将杠杆的平衡螺母向 (选填“左”或“右” 调节,直到杠杆在水平位置平衡。在 点悬挂3个质量均为 的钩码,在 点用弹簧测力计竖直向下拉杠杆,使其在水平位置重新平衡,如图(乙 所示,弹簧测力计的拉力是 . 取

在“探究杠杆的平衡条件”的实验中:
(1)实验前,杠杆静止时,发现杠杆左端低、右端高,此时杠杆处于 (填“平衡”或“非平衡” 状态,为使杠杆在水平位置平衡,应将杠杆右端的平衡螺母向 (填“左”或“右” 调节。
(2)调节杠杆在水平位置平衡后,进行如图所示的实验,用量程为 的弹簧测力计在 点竖直向上拉(如图中 所示),杠杆在水平位置平衡时,弹簧测力计的示数为 ;若弹簧测力计斜向上拉(如图中 所示),杠杆在水平位置平衡时,弹簧测力计的示数为 (填“大于”或“小于” ,此时拉力的方向与竖直方向的最大夹角为 (填“ ”、“ ”或“ ” 。
(3)杠杆上每个平衡螺母的质量为 ,杠杆的总质量(含两个平衡螺母)为 。实验前,调节杠杆在水平平衡的过程中,若只将右端的平衡螺母移动了距离 ,则调节前后杠杆(含两个平衡螺母)的重心在杆上移动的距离为 (填“ ” ““或“ ”

探究杠杆的平衡条件:
如图所示,是小鹰和小华同学用于探究杠杆平衡条件的实验装置。
(1)实验前,小鹰和小华同学发现实验装置如图甲所示,为了使杠杆在水平位置平衡,他们应将左端的螺母向左调或将右端的螺母向
调。
(2)实验中,两位同学在杠杆的左右两侧加挂钩码,如图乙所示,如果两人决定只改变左侧钩码的位置,则向 移动,才能使杠杆在水平位置重新平衡,改变钩码的个数及位置,并进行多次实验。
(3)实验后,两位同学将所得的数据分析处理,最终得到杠杆的平衡条件为 。
小飞用图1装置来探究杠杆的平衡条件,设弹簧测力计和钩码对杠杆的拉力分别为动力 和阻力 , 和 分别表示动力臂和阻力臂。他的实验思路是改变 、 和 ,测得杠杆平衡时所需的拉力 ,来寻找 、 、 和 四个物理量之间的关系。已知实验前已调节杠杆在水平位置平衡,弹簧测力计的量程为 ,杠杆上每一格长 。
实验次数 |
阻力 |
阻力臂 |
动力臂 |
动力 |
1 |
4 |
33 |
30 |
4.4 |
2 |
4 |
18 |
30 |
2.4 |
3 |
4 |
7.5 |
30 |
1.0 |
(1)为便于测量力臂,弹簧测力计应沿 方向拉杠杆,并使之在 位置平衡;
(2)小飞首先保持 和 不变而改变 ,所获得的实验数据如表格所示,第1次实验中弹簧测力计示数的放大图如图2所示,则 ,此时杠杆的类型与 (选填“筷子”或“老虎钳” 相同;
(3)为获得更多组数据,小飞继续进行(2)中实验,则为能顺利完成实验,在改变阻力臂 时, 应不超过 ;完成上述实验后,小飞接下来还应进行的实验有①保持 不变而改变 ;②保持 和 不变而改变 。

 粤公网安备 44130202000953号
粤公网安备 44130202000953号