计算:.
计算:
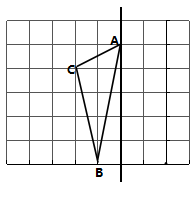
如图,在长度为1个单位长度的小正方形组成的正方形网格中,点A、B、C在小正方形的顶点上. (1)在图中画出与△ABC关于直线成轴对称的△A; (2) 线段被直线 ; (3) 在直线上找一点P,使PB+PC的长最短,并算出这个最短长度.
计算 (1)(﹣1)2015﹣+ +(﹣π)0; (2)
 .
.

 成轴对称的△A
成轴对称的△A ;
; 被直线
被直线 +
+ +(
+( ﹣π)0;
﹣π)0;


 粤公网安备 44130202000953号
粤公网安备 44130202000953号