如图甲所示是某船厂设计的打捞平台装置示意图.A是动滑轮,B是定滑轮,C是卷扬机,卷扬机拉动钢丝绳通过滑轮组AB竖直提升水中的物体,可以将实际打捞过程简化为如图乙所示的示意图.在一次打捞沉船的作业中,在沉船浸没水中匀速上升的过程中,打捞平台浸入水中的体积相对于动滑轮A未挂沉船时变化了0.4m3;在沉船全部露出水面并匀速上升的过程中,打捞平台浸入水中的体积相对于动滑轮A未挂沉船时变化了1m3.沉船浸没在水中和完全露出水面后卷扬机对钢丝绳的拉力分别为F1、F2,且F1与F2之比为3:7.钢丝绳的重、轴的摩擦及水对沉船的阻力均忽略不计,动滑轮的重力不能忽略.(水的密度取1.0×103kg/m3 g取10N/kg)求:
(1)沉船的重力;
(2)沉船浸没水中受到的浮力;
(3)沉船完全露出水面匀速上升1m的过程中,滑轮组AB的机械效率.
如图所示,工人站在水平地面,通过滑轮组打捞一块沉没在水池底部的实心金属物体A。工人用力将物体A竖直缓慢拉起,在整个提升过程中,物体A始终以0.1m/s的速度匀速上升。物体A没有露出水面之前滑轮组的机械效率为η1,工人对水平地面的压强为p1;当物体A完全露出水面之后滑轮组的机械效率为η2,工人对水平地面的压强为p2。若物体A重为320N,动滑轮重40N,工人双脚与地面的接触面积是400cm2,p1-p2=250Pa,绳重、水的阻力及滑轮轮与轴间的摩擦均可忽略不计,g取10N/kg,求:
(1)当物体A刚离开底部,受到水的浮力;
(2)金属A的密度;
(3)当物体A完全露出水面以后,人拉绳子的功率;
(4)η1与η2的比值。
图是从井中提升重物的装置示意图。O点为杠杆AB的支点,OA∶OB=2∶3。配重C通过绳子竖直拉着杠杆B端,其质量mC=100kg。杠杆A端连接由定滑轮和动滑轮组成的滑轮组,定滑轮和动滑轮的质量均为m,滑轮组下安装吊篮,吊篮底部固定一电动机D,电动机D和吊篮的总质量m0=10kg,可利用遥控电动机拉动绳子E端,通过滑轮组使吊篮升降,电动机D提供的功率恒为P。当吊篮中不装物体悬空静止时,地面对配重C的支持力N0为800N,杠杆B端受到向下的拉力为FB;将质量为m1的物体装入吊篮,启动电动机,当吊篮匀速上升时,地面对配重C的支持力为N1;物体被运送到地面卸下后,又将质量为m2的物体装到吊篮里运到井下,吊篮以0.6m/s的速度匀速下降时,地面对配重C的支持力为N2。已知N1∶N2=1∶2,m1∶m2=3∶2,不计杠杆重、绳重及摩擦,g取10N/kg。求: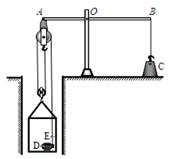
(1)拉力FB;
(2)动滑轮的质量m;
(3)物体的质量m2;
(4)电动机功率P。
如图甲是某中学科技小组设计的打捞水中物体的装置示意图。DB是以O点为转轴的水平杠杆,杠杆可以绕O点在竖直平面内转动,OD的长度为2m。水平地面上的配重E通过细绳竖直拉着杠杆D端,配重E的质量mE为250kg。安装在杠杆DB上的行走装置由支架、动滑轮X、提升电动机、定滑轮K构成,行走装置的质量m为20kg。电动机Q可以通过定滑轮S和动滑轮X拉动行走装置沿BO水平滑动。固定在提升电动机下的定滑轮K和动滑轮M组成滑轮组Y,当行走装置处于杠杆DB上C点的位置时,提升电动机拉动绳子H端,通过滑轮组Y竖直提升水中的圆柱体A。圆柱体A完全在水中,以0.1m/s匀速上升的过程中,滑轮组Y的机械效率为η1,配重E对地面的压强为p1;物体A以原来的速度匀速竖直上升,全部露出水面后,最终停在空中某高度时,配重E对地面的压强为p2。滑轮组Y提升物体A的过程中,行走装置受到的水平拉力始终为零,杠杆DB在水平位置保持平衡。电动机H处绳子拉力的功率随时间变化的情况如图乙所示。已知圆柱体A的质量mA为60kg,底面积为30dm2,p1与p2之比为4∶1。物体A被打捞出水面后,停留在一定高度,电动机Q开始拉动行走装置。在行走装置以0.05m/s的速度水平匀速移动的过程中,电动机Q处拉力T的功率为5W,行走装置受到的水平拉力为F。细绳和杠杆的质量、滑轮与轴的摩擦、水对物体的阻力均忽略不计,g取10N/kg。
求:(1)动滑轮M所受的重力;(2)机械效率η1;(3)OC的长度;(4)拉力F。
在生产玻璃过程中,常用位于天车上的卷扬机(其内部有电动机提供动力)通过滑轮组和真空吸盘提升玻璃,如图甲所示。当卷扬机通过滑轮组提升质量为 的玻璃并使玻璃以速度
的玻璃并使玻璃以速度 匀速上升时,卷扬对滑轮组绳端的拉力为
匀速上升时,卷扬对滑轮组绳端的拉力为 ,天车对卷扬机的支持力为
,天车对卷扬机的支持力为 ,拉力的功率为
,拉力的功率为 ,滑轮组的机械效率为
,滑轮组的机械效率为 ;当卷扬机通过滑轮组提升质量为
;当卷扬机通过滑轮组提升质量为 的玻璃并使玻璃以速度
的玻璃并使玻璃以速度 匀速上升时,卷扬机对滑轮组的拉力
匀速上升时,卷扬机对滑轮组的拉力 ,天车对卷扬机的支持力为
,天车对卷扬机的支持力为 。已知拉力所做功随时间变化的图像如图乙所示,卷扬机的质量为
。已知拉力所做功随时间变化的图像如图乙所示,卷扬机的质量为 ,滑轮
,滑轮 、
、 的质量均为
的质量均为 ,
, ,
, ,吸盘和绳的质量及滑轮与轴的摩擦均可忽略不计,
,吸盘和绳的质量及滑轮与轴的摩擦均可忽略不计, 取
取 。求:
。求:
(1)的大小;
(2)的大小;
(3)与的比值。
如图是工人提升物体的装置示意图,其中AB是一个不计重力、可以绕O点转动的杠杆,且AO:OB=2:5,杠杆B端系有重为1056N物体D,杠杆A端固定着滑轮组。质量为60kg的工人站在水平地面上,他对地面的压强p0=1.2×104Pa。当他利用该装置匀速提升重物M时,物体D受到的支持力为N1,工人对地面的压强p1=0.8×104Pa,此时滑轮组的机械效率η=90%;当工人利用该装置匀速提升重物N时,物体D受到的支持力为N2,工人竖直向下的拉力为F2;已知N1: N2="5:" 2,每个滑轮质量都相等,绳重及滑轮与轴的摩擦不计,g取10N/kg。求:
(1)提升重物M时工人竖直向下的拉力F1。
(2)提升重物N以0.5m/s的速度匀速上升时工人拉力的功率P。
 粤公网安备 44130202000953号
粤公网安备 44130202000953号