如图甲是某中学科技小组设计的打捞水中物体的装置示意图。DB是以O点为转轴的水平杠杆,杠杆可以绕O点在竖直平面内转动,OD的长度为2m。水平地面上的配重E通过细绳竖直拉着杠杆D端,配重E的质量mE为250kg。安装在杠杆DB上的行走装置由支架、动滑轮X、提升电动机、定滑轮K构成,行走装置的质量m为20kg。电动机Q可以通过定滑轮S和动滑轮X拉动行走装置沿BO水平滑动。固定在提升电动机下的定滑轮K和动滑轮M组成滑轮组Y,当行走装置处于杠杆DB上C点的位置时,提升电动机拉动绳子H端,通过滑轮组Y竖直提升水中的圆柱体A。圆柱体A完全在水中,以0.1m/s匀速上升的过程中,滑轮组Y的机械效率为η1,配重E对地面的压强为p1;物体A以原来的速度匀速竖直上升,全部露出水面后,最终停在空中某高度时,配重E对地面的压强为p2。滑轮组Y提升物体A的过程中,行走装置受到的水平拉力始终为零,杠杆DB在水平位置保持平衡。电动机H处绳子拉力的功率随时间变化的情况如图乙所示。已知圆柱体A的质量mA为60kg,底面积为30dm2,p1与p2之比为4∶1。物体A被打捞出水面后,停留在一定高度,电动机Q开始拉动行走装置。在行走装置以0.05m/s的速度水平匀速移动的过程中,电动机Q处拉力T的功率为5W,行走装置受到的水平拉力为F。细绳和杠杆的质量、滑轮与轴的摩擦、水对物体的阻力均忽略不计,g取10N/kg。
求:(1)动滑轮M所受的重力;(2)机械效率η1;(3)OC的长度;(4)拉力F。
图甲是某款电热水龙头。即开即热、冷热兼用。图乙是它的原理电路。R1、R2为电热丝,通过旋转手柄带动开关S接通对应的电路,从而实现冷水、温水、热水之间切换。有关参数如下表。不考虑温度对电阻丝的影响,请回答下列问题:
| 额定电压 |
220V |
|
| 额定 功率 |
温水 |
2200W |
| 热水 |
3000W |
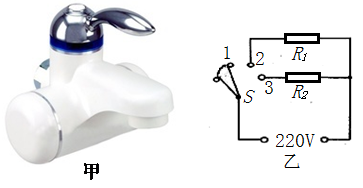
(1)开关置于2时,水龙头放出的水是 (选填“冷”、“温”或“热”)水。此时电路中的电流时多大?
(2)水龙头放热水时,正常工作60s,消耗的电能是多少?
(3)R2的电阻多大?
“骑观天下水,绿动岳阳城”。自今年4月我市自行车租赁系统正式运行以来,小明坚持骑自行车上学。某次小明骑车上学用时10min 。
(1)已知自行车的质量是20kg ,求自行车受到的重力大小。
(2)小明家距学校3000 m ,求小明骑车的平均速度。
(3)骑车过车中,小明用大小不同的力捏闸刹车,车停下来的快慢不同。刹车时捏闸刹用力越大,自行车就停得越急,请说明其中的道理。
家用电饭煲是利用电流的热效应来工作的,如图是某种型号电饭煲的简化电路。当温控开关S闭合时,电饭煲处于加热状态,此时若它两端的电压为220V,它的功率为1100W(不考虑温度对电阻值的影响)。则
(1)电饭褒在加热状态下工作0.lh,消耗的电能为多少KW•h?
(2)Ro的电阻为多少Ω?
(3)当温控开关S断开时,电饭煲的总功率与加热状态时相比,将如何变化?并请说明原因。
邵坪高速是连接邵阳市与新邵坪上沪昆高铁站的重要交通线,全长约34km,预计于今年年底正式通车。通车后,邵坪高速将与沪昆高铁实现无缝对接,有望实现1h左右从邵阳抵达长沙。若一辆小车质量为1.5×103kg,每个车轮与路面的接触面积为0.15m2,如图所示。请计算(g取1ON/kg):
(1)该小车的重力为多少N?
(2)该小车静止在水平路面上对路面的压强为多少Pa?
(3)若邵坪高速限速100km/h,该小车驶完邵坪高速全程最少需多少h。

 粤公网安备 44130202000953号
粤公网安备 44130202000953号