如图所示,一名同学在做俯卧撑,如果把人的躯干看作一个杠杆,这是一个______(省力/费力/等臂)杠杆,该杠杆的支点是_________(填图中字母)
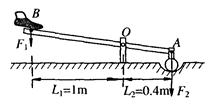
一辆搬运砖头的独轮车,车箱和砖头所受总质量120kg,独轮车的有关尺寸如图所示,它是一个 杠杆.推车时,人手向上的力F1应为 N,如地面的摩擦力是物重的0.2倍,该工人用水平方向的力是 牛使车以2米/秒匀速前进1分钟,F1做功是 焦耳,水平力的功率是 瓦;.

如图是一个弹簧门的示意图,相当于一个杠杆,弹簧的作用是当人进门后,它的拉力自动将门关闭,在开门时它起到阻力的作用。已知将门推到如图所示的位置时,推力F与门面垂直,它的力臂是0.8m,弹簧产生的阻力是120N,力臂是0.2m,求: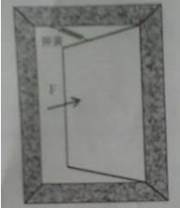
(1)弹簧拉力在门关闭的过程中,弹簧的 能转化为门的动能。
(2)将门推到如图所示的位置时,推力F的大小?(摩擦及其它阻力可不计)
(3)若此时人的手掌与门的接触面积为0.01m2,推力对门产生的压强是多少?
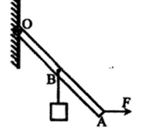
如下图是一种拉杆式旅行箱的示意图,使用时相当于一个___________ (填“省”或“费”)力杠杆;若箱和物品共重100N,动力臂是阻力臂的5倍,则抬起拉杆的力至少为___________N。
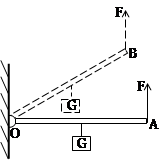
如图所示,轻质杠杆OA中点悬挂一重G=60N的物体,在A端施加一竖直向上的力F,杠杆在水平位置平衡,则F= N;保持F的方向不变,将杠杆从A位置匀速提到B位置的过程中,力F将 (填“变大”、“不变”或“变小” ).
在“探究杠杆的平衡条件”的实验中:
(1)实验前,杠杆静止时,发现杠杆左端低、右端高,此时杠杆处于 (填“平衡”或“非平衡” 状态,为使杠杆在水平位置平衡,应将杠杆右端的平衡螺母向 (填“左”或“右” 调节。
(2)调节杠杆在水平位置平衡后,进行如图所示的实验,用量程为 的弹簧测力计在 点竖直向上拉(如图中 所示),杠杆在水平位置平衡时,弹簧测力计的示数为 ;若弹簧测力计斜向上拉(如图中 所示),杠杆在水平位置平衡时,弹簧测力计的示数为 (填“大于”或“小于” ,此时拉力的方向与竖直方向的最大夹角为 (填“ ”、“ ”或“ ” 。
(3)杠杆上每个平衡螺母的质量为 ,杠杆的总质量(含两个平衡螺母)为 。实验前,调节杠杆在水平平衡的过程中,若只将右端的平衡螺母移动了距离 ,则调节前后杠杆(含两个平衡螺母)的重心在杆上移动的距离为 (填“ ” ““或“ ”

如图所示,用固定在墙上的三角支架ABC放置空调室外机.如果A处螺钉松脱,则支架会绕 点倾翻.已知AB长40cm,AC长30cm.室外机的重力为300N,正好处在AB中点处,则A处螺钉的水平拉力为 N(支架重力不计).为了安全,室外机的位置应尽量 (选填“靠近”或“远离”)墙壁.
图中所示的现象中由于杠杆的平衡被破坏而影响了人们需要的工作效果的是( )



| A.骆驼运载物品 | B.驴拉货物 | C.月球车降落在月球表面 | D.举重 |
在“探究杠杆平衡条件的实验”中:

(1)如图甲所示,杠杆左端下沉,则应将平衡螺母向 (选填“左”或“右” 调节,直到杠杆在水平位置平衡,在水平位置平衡的目的是便于测量 。
(2)如图乙所示,杠杆上的刻度均匀,在 点挂4个钩码,要使杠杆在水平位置平衡,应在 点挂 个相同的钩码;当杠杆平衡后,将 、 两点下方所挂的钩码同时朝远离支点 的方向各移动一小格,则杠杆的 (选填“左”或“右” 端将下沉。
(3)如图丙所示,在 点挂一定数量的钩码,用弹簧测力计在 点斜向上拉(与水平方向成 角)杠杆,使杠杆在水平位置平衡时,弹簧测力计的示数如图丙所示,已知每个钩码重 ,则在 点应挂 个钩码。
某同学在做“研究杠杆平衡条件”的实验时,进行了如下实验步骤:
a.把杠杆的中点支在支架上,这时发现杠杆左端高、右端低,则应该把杠杆的平衡螺母向 (选填“左”或“右”)调节,使杠杆在 位置平衡;
b.把钩码挂在杠杆的两边,改变钩码的个数和位置,使杠杆恢复平衡,记下两边的钩码的重,读出两边的力臂,获得一组实验数据;
c.改变力和力臂数值,再做两次实验;
d.算出各次实验的动力乘以动力臂和阻力乘以阻力臂的数值,分析数据得出结论.
(1)请将步骤a补充完整;
(2)进行步骤a的主要目的是为了直接从杠杆上读出 的大小;
(3)步骤d得出的实验结论应该是 ;
(4)图甲的杠杆已调至水平平衡,在A点挂了两个相同钩码,则应在B点挂 个相同的钩码,才能使杠杆保持水平平衡;

(5)上述实验步骤c的目的是为了 ;(只填代码)
| A.减小摩擦对实验的影响 | B.使每组数据更准确 |
| C.多次测量取平均值,减小误差 | D.获取多组数据,寻找普遍规律 |
(6)图乙所示,把弹簧测力计挂钩固定在C点,要使杠杆水平平衡,弹簧测力计向右上方拉(拉环固定在支架上)比竖直向上拉示数要 (选填“大”或“小”).
如图是一个杠杆式简易起吊机,它上面装了一个定滑轮可以改变拉绳的方向,杠杆OBA可绕O点转动.在图上画出动力臂L1和阻力臂L2.


 粤公网安备 44130202000953号
粤公网安备 44130202000953号