如图所示,在探究“杠杆的平衡条件”实验中,已知杠杆上每个小格的长度为
,当弹簧测力计在
点沿与水平方向成
角斜向上拉杠杆,使杠杆在水平位置平衡时,下列说法正确的是
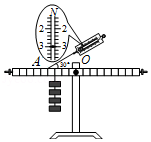
A.拉力的力臂为 B.此时为省力杠杆
C.弹簧测力计的示数为 D.钩码总重为
如图所示,长1.6m、粗细均匀的金属杆可以绕O点在竖直平面内自由转动,一拉力位置传感器竖直作用在杆上,并能使杆始终保持水平平衡.该传感器显示其拉力F的大小与作用点到O点距离x的变化关系如图乙所示.据图可知金属杆重( )

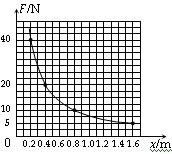
| A.5 N | B.10 N |
| C.20 N | D.40 N |
如图所示的几个工具在使用过程中,属于费力杠杆的是( )
A. |
B. |
C. |
D. |
如图1所示,某小组研究“杠杆的平衡条件”,器材:有刻度的杠杆、若干个相同的钩码、弹簧测力计等,O为杠杆的支点.

(1)实验前,应先调节杠杆在 位置平衡.这样做,除了可以消除自身的重力影响,还可以方便地测量或读出 .调节时,如发现杠杆左端偏高,应如何操作: .
(2)某实验小组记录两组数据如下:
| 实验序号 |
动力F1/N |
动力臂l1/cm |
阻力F |
2/N |
阻力臂l2/cm |
| 1 |
2 |
20 |
1 |
10 |
|
| 2 |
1 |
8 |
2 |
4 |
|
根据分析,这组数据中,实验序号为 (选填:“1”或“2”)的一组肯定有错误.检查发现是测量动力臂时读错了,动力臂的实际值比记录值 (选填:大或小).
(3)如图2所示,弹簧测力计在C处由竖直向上逐渐向右倾斜拉动杠杆,仍使杠杆在水平位置保持平衡,则弹簧测力计的示数将 (选填:变大、变小或保持不变),其原因是 .
(4)某次实验中,若采取如图3所示的方式悬挂钩码,杠杆也能在水平位置保持平衡(杠杆上每格等距),但老师却往往提醒大家不要采用这种方式,这主要是以下哪种原因 (选填字母).
A.一个人无法独立操作 B.需要使用太多的钩码
C.力臂与杠杆不重合 D.力和力臂数目过多
(5)如图4所示,实验小组选用长1.6m、粗细均匀的一只金属杆,绕O点在竖直平面内自由转动,同时将一个“拉力﹣﹣位移传感器”竖直作用在杆上,并使杠杆在水平位置始终保持平衡.该传感器显示其拉力F与作用点到O点距离x的变化关系如图5所示.由图可知金属杆重 N.
按如图所示,是小丽在“研究杠杆平衡条件”的实验中,使杠杆在水平位置平衡.如果在杠杆两边的钩码下面各增加一个大小相等的钩码,则杠杆( )

| A.仍然平衡 |
| B.不平衡,左端下降 |
| C.不平衡,右端下降 |
| D.无法确定 |
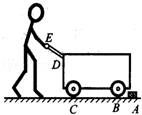
列车上出售的食品常常放在如图所示的小推车上,若货物均匀摆在车内,当前轮遇到障碍物时,售货员向下按扶把,这时手推车可以视为杠杆,支点是 (写出支点位置的字母),当后轮遇到障碍物A时,售货员向上提扶把,这时支点是 (写出支点位置的字母),这种情况下,手推车可以视为 杠杆.
如图所示,轻质杠杆支点为O,在已调平的杠杆两端分别挂上一些钩码,每一个钩码的质量相等,杠杆恰好在水平位置平衡,如果两边各拿走一个钩码,杠杆将( )

| A.仍保持平衡并静止 | B.不平衡,向顺时针方向转动 |
| C.不平衡,向逆时针方向转动 | D.仍保持平衡,但要转动 |
某实验小组在"研究杠杆平衡条件"的实验中:
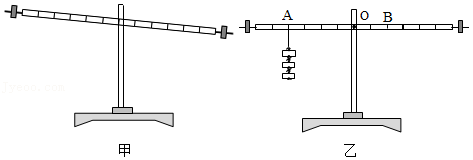
(1)实验时应先调节杠杆在 位置平衡,若出现如图甲所示情况,应将杠杆的平衡螺母向 (选填"左"或"右")调节。
(2)杠杆平衡后,他们在图乙所示的A位置挂上3个钩码,为了使杠杆在水平位置平衡,这时应在B位置挂上 个相同的钩码。
| 次数 |
F 1/N |
L 1/m |
F 2/N |
L 2/m |
| 1 |
2.0 |
0.05 |
△ |
0.10 |
| 2 |
3.0 |
0.10 |
2.0 |
0.15 |
| 3 |
2.0 |
0.30 |
3.0 |
☆ |
(3)上表是该小组在实验中记录杠杆平衡的部分数据,空格处所缺的数据:△= ,☆= 。
小明在“探究杠杆的平衡条件”实验中,所用的器材有:杠杆、支架、弹簧测力计、刻度尺、细线和质量相同的钩码若干个。

(1)实验前,将杠杆中点置于支架上,调节平衡螺母,使杠杆水平平衡;实验中,使杠杆在水平位置平衡,这样做的好处是便于在杠杆上直接测量 。
(2)实验过程中,将钩码悬挂于图中 点,保持阻力、阻力臂不变,在支点 右侧不同位置,用弹簧测力计施加竖直向下的拉力(动力),使杠杆水平平衡,测出每一组动力臂 和对应的动力 ,并记录在表中。请根据表中数据,在坐标系中绘制出 与 的图象,根据图象中实验数据可知,当 为 时, 为 。
次数 |
动力
|
动力臂
|
1 |
0.75 |
0.40 |
2 |
1.0 |
0.30 |
3 |
1.5 |
0.20 |
4 |
2.00 |
0.15 |
5 |
3.0 |
0.10 |
(3)实验中小明发现,保持杠杆处于水平平衡,当弹簧测力计的拉力方向偏离竖直方向时,弹簧测力计的拉力会变大,原因是 。
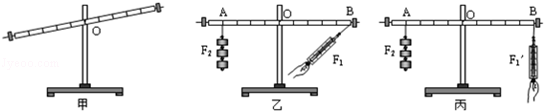
在探究“杠杆平衡的条件”实验中,所用的实验器材有:杠杆(每小格均等长)、铁架台、刻度尺、细线和若干个重为 的钩码。

(1)为了便于测量力臂要将如图甲所示杠杆调节在水平位置平衡,应将平衡螺母适当往 右 (选填“左”或“右” 调;
(2)杠杆调节好后,进行了三次实验,实验情景如图乙、丙、丁所示,以两边钩码的重力分别为动力 和阻力 ,对应的力臂为 和 ,由此可得杠杆的平衡条件为: 。实验中进行多次实验的目的是 (选填“ ”或“ ”
.取平均值减少误差
.使实验结论具有普遍性
(3)将如图丁所示杠杆两边的钩码各撤掉1个,则杠杆 (选填“保持平衡”、“左端下沉”或“右端下沉” ;
(4)如图1所示,用细绳竖直向上拉,使杠杆在水平位置平衡,则拉力 为 ;保持杠杆平衡,将细绳转到虚线位置时,拉力 大小将 (选填“变大”、“不变”或“变小” ;

(5)在生活、生产中经常应用到杠杆的平衡条件,例如用天平测量物体的质量。某次用天平测量物体质量时,如图2所示,则物体的质量为 。
在“探究杠杆的平衡条件”的实验中:
(1)在实验前,要求杠杆在水平位置平衡的目的是 .小王同学把杠杆放在支架后,在没有挂钩码时杠杆的平衡位置如图(甲)所示.为使杠杆在水平位置平衡,应将杠杆右端螺母向 边旋一些(左/右).
(2)调好后,第一组按图(乙)进行实验,第二组按图(丙)进行实验.你认为第 组实验更好.
(3)小王的实验数据如表:
| 动力F1/N |
动力臂L1/m |
阻力F2/N |
阻力臂L2/m |
| 3 |
0.2 |
2.4 |
0.25 |
根据实验数据分析,可得出杠杆的平衡条件:动力×动力臂=阻力×阻力臂
分析小王所做实验存在不足,原因是 .
利用如图所示的装置来探究"杠杆的平衡条件"。

(1)实验前,杠杆如图甲所示,可将杠杆两端的平衡螺母向 (选填"左"或"右" 调节,使杠杆在水平位置平衡,这样做的好处是可以直接从杠杆上读出 。
(2)杠杆平衡后,如图乙所示,在杠杆 点挂3个相同的钩码,可在杠杆的 点挂 个相同的钩码,就可使杠杆重新在水平位置平衡。
(3)保持 点钩码数量和力臂不变,杠杆在水平位置平衡时,测出多组动力臂 和动力 的数据,绘制了 的关系图象,如图丙所示。请根据图象推算,当 为 时, 为 。
如图,杠杆OA在力F1、F2的作用下处于静止状态,l2是F2的力臂,画出F1的力臂和力F2.
如图所示,OAB为轻质杠杆,可绕支点O自由转动,在B端施加一个动力使杠杆在水平位置平衡,该杠杆( )

| A.一定是省力杠杆 | B.一定是费力杠杆 |
| C.一定是等臂杠杆 | D.以上情况都有可能 |




 粤公网安备 44130202000953号
粤公网安备 44130202000953号