小明在“探究杠杆平衡条件”的实验中:
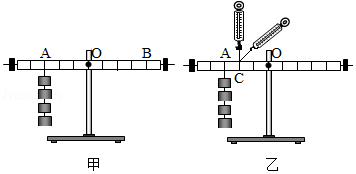
(1)实验前调节平衡螺母使杠杆在水平位置平衡,目的之一是方便测量 ;
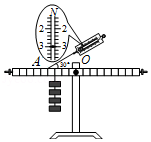
(2)如图甲所示。在杠杆左边 处挂4个钩码,要使杠杆在水平位置平衡,在杠杆 处挂 个钩码(实验中所用的钩码均相同);
(3)小明又用弹簧测力计在 处竖直向上拉,如图乙所示,当弹簧测力计逐渐向右倾时,使杠杆仍然在水平位置平衡,则弹簧测力计的示数将逐渐 (选填“变大”、“变小”或“不变” 。
某同学用图所示装置做探究杠杆平衡条件的实验,图中杠杆匀质且均匀刻度。当杠杆水平平衡后,在左侧第2格挂3个相同的钩码,则应在右侧第3格上挂 个相同的钩码才能使杠杆水平平衡;若在右侧改用弹簧测力计向下拉,弹簧测力计由竖直方向逐渐向左转动,杠杆始终保持水平平衡,则弹簧测力计的示数将逐渐 (选填“增大”、“减小”或“不变”)。

如图所示,杠杆处于平衡状态,如果在物体A和B下端同时挂一个相同质量的钩码,下列判断正确的是( )
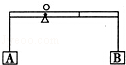
| A.杠杆不能平衡,左端下沉 |
| B.杠杆不能平衡,右端下沉 |
| C.杠杆仍能平衡 |
| D.无法判断 |
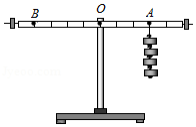
小明利用刻度均匀的轻质杠杆进行“探究杠杆的平衡条件”实验,已知每个钩码重0.5N。
(1)实验前,将杠杆的中点置于支架上,当杠杆静止时,发现杠杆左端下沉,这时应将平衡螺母向 (选填“左”或“右”)调节,直到杠杆在水平位置平衡。你认为实验中让杠杆在水平位置平衡的好处是 。
(2)在图甲中的A点悬挂4个钩码,要使杠杆仍保持水平位置平衡,需在B点悬挂 个钩码。
(3)如图乙所示,取走悬挂在B点的钩码,改用弹簧测力计在C点竖直向上拉,仍使杠杆水平位置平衡,测力计的拉力为 N;若在C点改变弹簧测力计拉力的方向,使之斜向右上方,杠杆仍然水平位置平衡,则测力计的读数将 (选填“变大”“变小”或“不变”),画出此时力F的力臂。

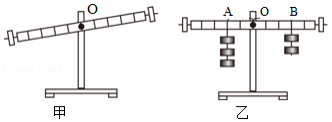
在“探究杠杆的平衡条件”实验中:
(1)图甲中,为使杠杆在水平位置平衡,应将右端的平衡螺母向 侧调节。
(2)图乙中,杠杆恰好处于水平平衡状态,若在 处下方再挂一个钩码,则 处所挂钩码须向右移动 格,可使杠杆在水平位置再次平衡。
(3)杠杆处于图甲所示位置时,小李同学就在杠杆上挂钩码进行实验,小明认为这样操作会对实验产生以下影响:
①杠杆自身重力可能会对实验产生影响
②可能不便于测量力臂或出现力臂测量错误
③无法得出杠杆平衡条件
你认为正确的是 。
.①②
.①③
.②③
在研究“杠杆的平衡条件”实验中,

(1)实验前发现杠杆右端偏高,需将平衡螺母往 移一些,直至杠杆在 位置平衡.实验过程中,要使杠杆在水平位置平衡,目的是 .
(2)如图乙所示是三次实验结果,实验时所用的每个钩码重0.5N,杠杆上每一格长5cm,
| 实验次数 |
动力F1/N |
动力臂L1/cm |
阻力F2/N |
阻力臂L2/cm |
| 1 |
1.5 |
10 |
1 |
② |
| 2 |
1 |
20 |
① |
10 |
| 3 |
1 |
20 |
1.5 |
10 |
(3)将表格中的实验数据补充完整.① ②
(4)分析第一、二次测量实验数据,可以得到: .
(5)在分析第三次测量数据时,该同学发现F1L1和F2L2并不相等,该同学实验过程中的失误之处在于 .
人在动物园内,用弹簧测力计称出了一头大象的重量,在称象过程中,他用到吊车、铁笼和一根很长的槽钢等辅助工具,操作步骤如下:
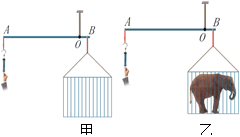
a.如图甲所示,将铁笼系于槽钢上的B点,当吊车吊钩在槽钢上的悬吊点移至0点时,槽钢在水平位置平衡.
b.将大象引入铁笼,保持吊钩悬吊点O点和铁笼悬挂点B点的位置不变.用弹簧测力计竖直向下拉住槽钢的另一端,使之再次茌水平位置平衡,如图乙所示.测得OB=6cm,OA=9m,弹簧测力计的示数为200N.根据上述数据测出了大象的重量.
(1)大象的重量为 N.
(2)设计步骤a的目的是 .
如下图所示,小华用笤帚在扫地,O为支点,作用在A点的动力为F1.在右侧图中画出作用在B点的阻力F2的示意图及其力臂L2。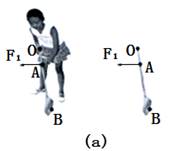
在探究杠杆平衡条件的实验中,某同学发现杠杆左端低右端高,要使杠杆在水平位置平衡,应将杠杆左端的平衡螺母向 (选填“内”或“外” 调节;在杠杆的右边 处挂4个质量均为 的砝码,如图所示,要使杠杆在水平位置平衡,应在杠杆左边的 处竖直向下用 的力来拉 。
探究杠杆的平衡条件
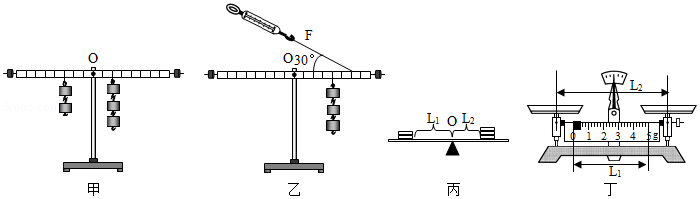
(1)杠杆两端的螺母作用是 。
(2)小明用如图甲所示装置,进行实验并收集了下表中的数据,分析数据可知,杠杆的平衡条件是 。
(3)小明又用如图乙所示装置进行实验,请在图中画出拉力 的力臂,弹簧测力计的读数应是 .(一个钩码重
(4)如图丙所示,小红实验时在一平衡杠杆的两端放上不同数量的相同硬币,杠杆仍在水平位置平衡。她用刻度尺测出 和 ,则 (选填“ ”“ ”或“ ” 。
实验次数 |
动力 |
动力臂 |
阻力 |
阻力臂 |
1 |
0.5 |
0.2 |
1.0 |
0.1 |
2 |
1.0 |
0.15 |
1.5 |
0.1 |
3 |
3.0 |
0.1 |
2.0 |
0.15 |
【拓展】探究了杠杆的平衡条件后,小红对天平上游码的质量进行了计算,她用刻度尺测出 和 (如图丁所示),则游码的质量为 。
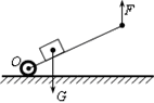
如图是人抬独轮车车把时的简化示意图,此时独轮车相当于一个 (省力/费力)杠杆;若动力臂是阻力臂的3倍,物体和车总重G 为1200N,抬起车把的力F为 N.
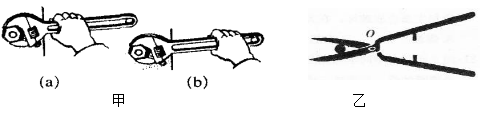
如图甲所示,用扳手拧螺帽时,图 (选填“a”、“b”)的握法更有利于拧紧或松开螺帽,原因是 .如图乙所示为园艺工人修剪树枝使用的剪刀.在用它剪断较粗的树枝时,园艺工人应当让树枝尽量 (选填“靠近”、“远离”)O点,原因是 .
如图所示,在探究“杠杆的平衡条件”实验中,已知杠杆上每个小格的长度为
,当弹簧测力计在
点沿与水平方向成
角斜向上拉杠杆,使杠杆在水平位置平衡时,下列说法正确的是
A.拉力的力臂为 B.此时为省力杠杆
C.弹簧测力计的示数为 D.钩码总重为
如图所示,长1.6m、粗细均匀的金属杆可以绕O点在竖直平面内自由转动,一拉力位置传感器竖直作用在杆上,并能使杆始终保持水平平衡.该传感器显示其拉力F的大小与作用点到O点距离x的变化关系如图乙所示.据图可知金属杆重( )

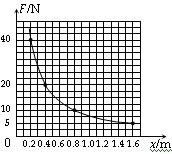
| A.5 N | B.10 N |
| C.20 N | D.40 N |

 粤公网安备 44130202000953号
粤公网安备 44130202000953号