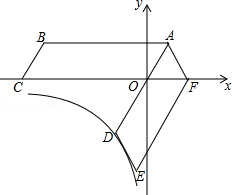
如图,四边形 ABCO是平行四边形, OA=2, AB=6,点 C在 x轴的负半轴上,将▱ ABCO绕点 A逆时针旋转得到▱ ADEF, AD经过点 O,点 F恰好落在 x轴的正半轴上,若点 D在反比例函数 y= ( x<0)的图象上,则 k的值为 .
相关试题
如图,平行四边形ABCD中,AE平分∠BAD交BC边于E,EF⊥AE交CD边于F,延长BA到点G,使AG=CF,连接GF.若BC=7,DF=3,tan∠AEB=3,则GF的长为 .
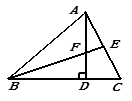
如图,DE⊥AB于E,DF⊥AC于F,若BD=CD,BE=CF,则下列结论:①DE=DF;②AD平分∠BAC;③AE=AD;④AB+AC=2AE中正确的是 .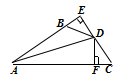
相关知识点
推荐套卷
 粤公网安备 44130202000953号
粤公网安备 44130202000953号