如图,连接在一起的两个正方形的边长都为1 ,现有一个微型机器人由点A开始按从A→B→C→D→E→F→C→G→A→……的顺序沿正方形的边循环移动.
,现有一个微型机器人由点A开始按从A→B→C→D→E→F→C→G→A→……的顺序沿正方形的边循环移动.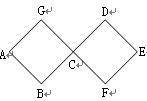
(1)第一次到达G点时,微型机器人移动了 ;
(2)当微型机器人移动了2013时,它停在 点.
 ▲
▲
 的解集是 ▲.
的解集是 ▲.
 有意义的x的取值范围是 ▲.
有意义的x的取值范围是 ▲.相关知识点
推荐套卷
如图,连接在一起的两个正方形的边长都为1,现有一个微型机器人由点A开始按从A→B→C→D→E→F→C→G→A→……的顺序沿正方形的边循环移动.
(1)第一次到达G点时,微型机器人移动了 ;
(2)当微型机器人移动了2013时,它停在 点.
 粤公网安备 44130202000953号
粤公网安备 44130202000953号