小强在探究“杠杆的平衡条件”时:
(1)为了便于测量力臂,他先调节杠杆两端的 ,使杠杆在____位置平衡;
(2)你是学习小组的组长,在检查小强实验实验记录,在这两组数据中,发现实验序号为_______的一组数据是错误的。经检查,结果是测量阻力臂时读错了,阻力臂的实际值应为_______m;小强得到杠杆的平衡条件,你认为不够合理,理由是
| 实验序号 |
动力F1/N |
动力臂L1/m |
阻力F2/N |
阻力臂L2/m |
| 1 |
2 |
0.3 |
l |
0.4 |
| 2 |
1 |
0.4 |
2 |
0.2 |
如图所示是一种健身器械,AOB可视为一个杠杆,O是它的支点。
⑴小明用力向下拉杠杆时,重物被抬起.此时AOB是一个__________杠杆。
⑵他想更容易抬起重物,应该将手 (选填“靠近”或“远离”) O点,这是因为增大了 .
如右图所示,横放在地面上的木桩重1000N,长2m,将它竖起来至少用多大的力?并且在图中画出支点、阻力、动力臂和阻力臂.
某杠杆平衡时,作用在杠杆上的动力是20N,阻力是80N,那么动力臂与阻力臂之比为 。若该杠杆的动力臂长为1.2m,则阻力臂长为 m。
如图所示,一均匀杠杆A处挂2个钩码,B处挂1个钩码,杠杆恰好平衡,若每个钩码质量均为50g,在A、B两处再各加一个钩码,那么:( )
A.杠杆仍平衡
B.杠杆左边向下倾
C.杠杆右边向下倾
D.无法判断
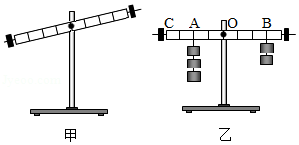
在探究杠杆平衡条件的实验中:
(1)小明发现杠杆右端低左端高,要使它在水平位置平衡,应将杠杆右端的平衡螺母向 调节。小明调节杠杆在水平位置平衡的主要目的是 。
(2)如图甲所示,在杠杆左边A处挂四个相同钩码,要使杠杆在水平位置平衡,应在杠杆右边B处挂同样钩码 个。
(3)如图乙所示,用弹簧测力计在C处竖直向上拉,当弹簧测力计逐渐向右倾斜时,使杠杆仍然在水平位置平衡,则弹簧测力计的示数将 (变大/变小/不变) 。
小张在探究“杠杆平衡条件”实验中,给他提供的实验器材有:杠杆、支架、弹簧测力计、刻度尺、细线和质量相同的钩码若干个。
(1)实验前,将杠杆中点置于支架上,当杠杆静止时,如图所示,此时应把杠杆左端的平衡螺母向 (选填“左”成“右” 调节;
(2)小张将实验数据记录在表中:
次数 |
动力 |
动力臂 |
阻力 |
阻力臂 |
1 |
1 |
10 |
2 |
5 |
2 |
1.5 |
5 |
0.5 |
15 |
3 |
2 |
15 |
1.5 |
▲ |
表格中空缺的实验数据“▲”是 。
(3)小张在实验中多次改变力和力臂的大小主要是为了 (只有一个正确答案,选填答案序号)。
①减小摩擦 ②多次测量取平均值减小误差
③使每组数据更准确 ④获取多组实验数据归纳出物理规律。

如图所示是工人师傅推车运送纯净水的图片,对于这两种方法中哪种比较省力的判断,下列说法正确的是( )

| A.图甲的方法比较省力 |
| B.图乙的方法比较省力 |
| C.图甲和图乙两种方法所用的力大小相等 |
| D.无法判断 |
劳动人民通过对自然现象的观察和研究,总结出许多富有物理含义的谚语、俗语。下列四句谚语、俗语中对应的物理知识正确的是( )
| A.“孤掌难鸣”————一个物体也可以产生力的作用 |
| B.“隔墙有耳”————固体能传声 |
| C.“真金不怕火炼”——金的熔点高于一般炉火火焰的温度 |
| D.“秤砣虽小压千斤”————杠杆的平衡条件 |
如图所示,是一种指甲刀的结构示意图,下列说法正确的是( )
| A.ABC是一个省力杠杆 |
| B.D处刀刃较薄,可以增大压力 |
| C.杠杆ABC上有粗糙的花纹,可以减小摩擦 |
| D.指甲刀只有一个杠杆 |
如图所示,重力不计的一木板可绕O点无摩擦转动,在A端挂一边长为50cm的正方体P,一个体重为500N的中学生站在B点时,P对地面的压强刚好为零,且OA=1m,OB=3m,则物体P的重力为 N,当人向左走1m时,P对地面的压强为 Pa。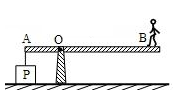
如图所示,一根粗细均匀的铁棒AB静止在水平地面上,现用力F将铁棒从水平地面拉至竖直立起。在这个过程中,力F作用在A端且始终与铁棒垂直,则用力F将( )
| A.逐渐变大 | B.逐渐变小 | C.保持不变 | D.先变小后变大 |
在“探究杠杆的平衡条件”的实验中。
(1)在杠杆上挂钩码前,杠杆静止在甲图中的位置,为使杠杆水平平衡,应将右端的平衡螺母向 (选填“左”或“右” 调节。将杠杆调节水平平衡的目的是避免 对实验的影响和便于 。
(2)乙图中杠杆恰好处于水平平衡,若在 处下方再挂一个相同钩码,为使杠杆保持水平平衡,则需将挂在 处的钩码向右移动 格。
(3)若取掉乙图中挂在 处的钩码,改用弹簧测力计钩在 处对杠杆施拉力,为使杠杆保持水平平衡,且弹簧测力计示数最小,则弹簧测力计对杠杆的拉力方向是 。
(4)此实验多次改变挂在支点 两边钩码的质量和悬挂位置,收集杠杆平衡时多组动力,动力臂、阻力和阻力臂的数据,其目的是 (选填“减小误差”或“寻找普遍规律” 。


 粤公网安备 44130202000953号
粤公网安备 44130202000953号