如图所示是活塞式抽水机的的摇柄,AOB是一杠杆,在图中作出阻力F2的示意图和动力臂L1。
如图所示,在水平平衡的杆杆的A点挂10的钩码,用调好的弹簧测力计竖直向上拉杠杆的B点是杠杆在水平位置平衡,则测力计的示数是 N,如果将测力计沿虚线方向拉,仍使杠杆在水平位置平衡,则测力计的示数应变 。(选填“大”或“小”)

|
如图所示,杆秤秤砣的质量为0.1千克,杆秤的质量忽略不计。若杆秤水平静止时,被测物和秤砣到秤纽的距离分别为0.05米、0.2米,则被测物的质量为 千克。若秤砣有缺损时,则杆秤所示的质量值 被测物的真实质量值(选填“小于”、“等于”或“大于”)。
研究杠杆平衡条件的实验:

(1)如图,杠杆的位置如图a所示,此时应调节杠杆两端的螺母使其向 (选填“左”或“右”)移动,使杠杆在水平位置平衡,实验时,施加的动力和阻力的方向都是竖直方向,这样做的好处是 。
(2)某同学通过多次实验操作及数据分析,得出杠杆平衡的条件是:动力×动力作用点到支点的距离=阻力×阻力作用点到支点的距离,你认为他的结论 (选填:“可靠”或“不可靠”),理由是
(3)如图利用如图c所示装置进行实验,每个钩码重0.5N,杠杆平衡时弹簧测力计的读数应为 N.如果保持弹簧测力计拉力作用点的位置不变,把弹簧测力计沿虚线方向拉,为了保证杠杆在水平位置平衡,其示数将 (选填:“变大”“不变”或“变小”).
某同学分别用如图所示的(a)、(b)两种方法挑着同一个物体行走,a图中手施加的动力 b图中手施加的动力;a图中肩受到的压力 b图中受到的压力(选填“>”、“=”或“<”)。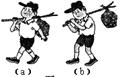
(1)图是使用钓鱼竿的示意图,O为支点,Fl是手对竿的作用力,F2是鱼线对竿的作用力,请在图中画出F2的力臂。
(2)请画出图中入射光线AO对应的大致折射光线。
人类在探索自然规律的过程中,总结许多科学研究方法。如控制变量法、实验推理法、理想模型法、等效替代法等。下列过程中运用了“实验推理法”的是( )
| A.牛顿第一定律的得出 |
| B.将撬棒、剪刀等抽象为杠杆 |
| C.用总电阻替代各分电阻 |
| D.探究滑动摩擦力的大小与什么因素有关 |
如图所示,有一质量不计的长木板,左端可绕O点转动,在它的右端放一重为G的物块,并用一竖直向上的力F拉着。当物块向左匀速运动时,在此过程中,拉力F( )
| A.变小 | B.变大 | C.不变 | D.先变大后变小 |
如图所示,活塞式抽水机手柄可以看作是绕O点转动的杠杆,它在动力F1和阻力F2的作用下,处于平衡状态,则( )
| A.F1•OC=F2•OA | B.F1•OD=F2•OB |
| C.F1•OE=F2•OA | D.F1•OE=F2•OB |
如图所示,在一次野外活动中,某同学先后用甲、乙两种方式杠着同样的包裹前时。两种方式中哪种更轻便、更合理?请从物理学的角度说明理由。
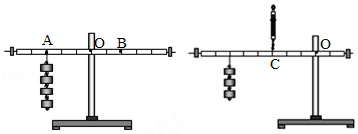
如图是某同学利用刻度均匀的杠杆探究“杠杆平衡条件”的实验(每个钩码重0.5N.杠杆上每一小格距离为1cm,不考虑杠杆自重对实验的影响)。
(1)实验前,发现杠杆静止时左端下沉,这时应将平衡螺母向 (填“左”或“右”)端调节,直到杠杆在水平位置平衡,这么做的目的是便于 。
(2)如图甲所示,在杠杆A点处挂4个钩码,B点处应挂 个同样的钩码,杠杆仍然在水平位置平衡。若两边同时都多挂上一个钩码,则杠杆的 (填“左”或“右”)端下沉。
(3)该同学又进行了如图乙所示的探究,发现用弹簧测力计在C点竖直向上拉动,使杠杆仍然在水平位置平衡时需要施加的拉力是3N,当拉力F向右倾斜时,仍要保持杠杆在水平位置平衡,拉力F的大小将 (填“变大”、“变小”或“不变”),原因是 。
(4)综合分析后,你能得到杠杆的平衡条件是 。




 粤公网安备 44130202000953号
粤公网安备 44130202000953号