按照要求作图.
(1)在图甲中作出物体A所受重力的示意图和拉力F的力臂l.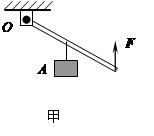

(2)用笔画线代替导线,将图乙中的灯泡和三线插座正确连入家庭电路中.
如图所示,用固定在墙上的三角支架ABC放置空调室外机。如果A处螺钉松脱,则支架会绕________点倾翻。为了安全,室外机应尽量______(填“靠近”或“远离”)墙壁。
如图中搬运砖头的独轮车,使用时可视为 (选填“省力”或“费力”)杠杆:若车厢或砖头所受的总重力G为1000N(车架所受重力忽略不计).独轮车的有关尺寸如图,推车时,人手向上的力F的大小为 N. .
按要求作图:
(1)如图甲是某同学向斜上方抛出重为20N的实心球,请在图中画出球在空中飞行时
的受力示意图(不计其空气阻力);
(2)请画出图乙中潜艇上浮时所受重力和浮力的示意图;(小黑点O表示潜水艇的重心)
(3)请在丙图中画出压缩的弹簧对拇指的弹力的示意图。
(4)在图中,画出杠杆AB在图示位置静止时作用在A点的最小力F的方向及其力臂l.
小华通过实验探究杠杆平衡时动力和动力臂的关系.实验过程中,保持阻力、阻力臂不变,在杠杆水平平衡时,测出每一组动力臂L1和动力F1的数据,并利用实验数据绘制了F1与L1的关系图象,如图所示.请根据图象推算,当L1为0.1m时,F1为 N.
利用如图所示的装置估测物体重G,当杠杆平衡时,已知力F大小为5N,则物体重( )

| A.大于5N | B.小于5N | C.等于5N | D.无法确定 |
如图a所示,用外力F把一个物体压在竖直的墙壁上使其静止,请画出物体在竖直方向上受力的示意图.
(2)如图b所示,S是烛焰上S点经凸透镜所成的实像,SA是从S点上射向凸透镜的一条任意光线,请画出光线SA经凸透镜折射后的光路图.
(3)工地上搬运砖头的独轮车,车厢和砖头总重力为G=1000N,独轮车的有关尺寸如图c所示.推车时,工人对车把向上的作用力F是 N.
(4)投篮时,相对于空中飞行的篮球,篮球框是 的.(选填“运动”或“静止”)
(5)一标准大气压下,把质量为500g、初温为20℃的水加热至沸腾,水需要吸收的热量是 J.【c水=4.2×103J/(kg•℃)
考场内小明信心十足,因为他在学习中使用了许多好方法,对知识掌握得很好,下面是他利用对比法进行实验探究的部分过程.请你在空格内替小明同学填上合适的内容.
(1)用天平和量筒测量某新型合金的密度.
| 调平 |
如图为天平放在水平桌面上,指针所在分度盘的位置,这时应向 (选填“左”或“右”)移动平衡螺母,使天平的横梁平衡.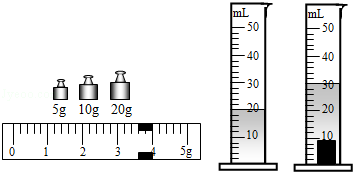  |
| 过程 |
某次测量,天平右盘中砝码及游码在标尺上的位置和量筒的示数如图所示,据此可知合金的密度是 kg/m3. |
| 讨论 |
实验中多次测量合金密度并求平均值是为了 . |
(2)探究杠杆的平衡条件
| 调平 |
调节杠杆两端的平衡螺母,使杠杆在水平位置平衡. |
| 过程 |
图为某次测量力臂的示意图,这时动力臂l2是 cm. |
| 讨论 |
实验中多次改变动力F1和动力臂l1的大小,并相应调节阻力F2和阻力臂l2.这样做的目的是 (填下列选项的番号). A.使结论具有普遍性 B.找出杠杆的平衡条件 C.求平均值. |
(3)天平测量质量时利用了杠杆原理,该原理的字母表达式为 .
如图所示,重力不计的木棒AOB可绕支点O无摩擦转动,木棒AB长为3m,均匀正方体甲的边长为10cm,物体乙的质量为5.6kg。当把甲乙两物体用细绳分别挂在木棒的两个端点A、B上时,木棒在水平位置平衡,此时物体甲对地面的压强为3000Pa,支点O距A点1.6m。求: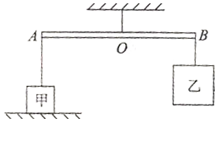
(1)物体乙受到的重力;
(2)物体甲受到的支持力;
(3)物体甲的密度。
按要求完成下面实验题:
(1)在研究杠杆平衡条件的实验中:把杠杆挂在支架上,实验前没有挂钩码时,发现杠杆右端下倾,可将右端螺母向 边旋转(选填“左”或“右”),使杠杆在水平位置平衡。使杠杆在水平位置平衡的目的是便于测量 ;实验中共有6个钩码,杠杆上每格距离相等,调节好杠杆平衡后,在杠杆左边离支点2格的A处挂了3个钩码,如图甲所示,为使杠杆在水平位置平衡,你的做法是: 。(写出一种方法)
(2)在探究“物体动能的大小与哪些因素有关”的实验中,小云让质量相同的铁球从斜面的 高度由静止释放(填“相同”或“不同”),撞击同一木块,如图乙所示。本实验要探究的是物体动能的大小与物体 的关系。
(1)小云家在装修房子时,为了美观,在客厅的天花板上安装了一块平面镜,如图甲所示。请在图甲中画出物体AB在平面镜中所成的像。
(2)如图乙所示为一个电热水壶的简易图,当力F作用在壶盖上时,可将壶盖打开。请在图乙中画出F的力臂L。
请按要求作图:
(1)重10N的物体漂浮在水面上静止不动,请在图甲中作出物体所受力的示意图;
(2)图乙是用杠杆提升重物的装置,画出拉力F的力臂L。

图是液压汽车起重机的示意图。请你分别画出作用在吊臂上的动力F1的力臂L1和阻力F2的力臂L2。

 粤公网安备 44130202000953号
粤公网安备 44130202000953号