
相关试题
(2014年湖北襄阳3分)如图,在矩形ABCD中,点E,F分别在边AB,BC上,且AE= AB,将矩形沿直线EF折叠,点B恰好落在AD边上的点P处,连接BP交EF于点Q,对于下列结论:①EF=2BE;②PF=2PE;③FQ=4EQ;④△PBF是等边三角形.其中正确的是()
AB,将矩形沿直线EF折叠,点B恰好落在AD边上的点P处,连接BP交EF于点Q,对于下列结论:①EF=2BE;②PF=2PE;③FQ=4EQ;④△PBF是等边三角形.其中正确的是()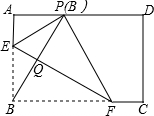
| A.①② | B.②③ | C.①③ | D.①④ |
(2014年黑龙江龙东地区3分)如图,正方形ABCD中,AB=6,点E在边CD上,且CD=3DE.将△ADE沿AE对折至△AFE,延长EF交边BC于点G,连接AG、CF.则下列结论:①△ABG≌△AFG;②BG=CG;③AG∥CF;④S△EGC=S△AFE;⑤∠AGB+∠AED=145°.其中正确的个数是()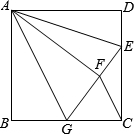
| A.2 | B.3 | C.4 | D.5 |
(2014年黑龙江齐齐哈尔、大兴安岭地区、黑河3分)如图,四边形ABCD是矩形,AB=6cm,BC=8cm,把矩形沿直线BD折叠,点C落在点E处,BE与AD相交于点F,连接AE,下列结论:
①△FED是等腰三角形;②四边形ABDE是等腰梯形;③图中共有6对全等三角形;④四边形BCDF的周长为 cm;⑤AE的长为
cm;⑤AE的长为 cm.
cm.
其中结论正确的个数为()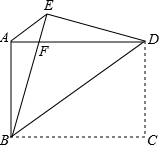
| A.2个 | B.3个 | C.4个 | D.5个 |
(2014年贵州安顺3分)如图,MN是半径为1的⊙O的直径,点A在⊙O上,∠AMN=30°,点B为劣弧AN的中点.点P是直径MN上一动点,则PA+PB的最小值为( )
A. |
B. |
C. |
D. |

推荐套卷
 粤公网安备 44130202000953号
粤公网安备 44130202000953号