 ,
,  分别是
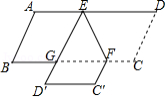
分别是  的边
的边  、
、  上的点,
上的点,  ,
,  ,将四边形
,将四边形  沿
沿  翻折,得到
翻折,得到  ,
,  交
交  于点
于点  ,则
,则  的周长为
的周长为 

相关试题
已知ΔABC是等边三角形,点D、E分别在AC、BC边上,且AD=CE,AE与BD交于点F,则∠AFD的度数为()
A.60° B.45° C.75° D.70°
下列说法正确的是().
| A.“邻补角相等吗?”是一个命题 |
| B.“同位角相等”的逆命题是假命题 |
| C.“相等的角是对顶角”是真命题 |
| D.“如果两条直线不相交那么一定平行”是真命题 |
如图,已知AB=AD,那么添加下列一个条件后,仍无法判定△ABC≌△ADC的是( )
| A.CB=CD | B.∠BAC=∠DAC |
| C.∠BCA=∠DCA | D.∠B=∠D=90° |
 ,则以x,y的值为两边长的等腰三角形的周长为()
,则以x,y的值为两边长的等腰三角形的周长为() 、2
、2 、
、 、
、
相关知识点
推荐套卷
 粤公网安备 44130202000953号
粤公网安备 44130202000953号