如图,机器人从A点沿着西南方向行了个4单位,到达B点后观察到原点O在它的南偏东60°的方向上,则原来A的坐标为 .(结果保留根号)
在平面直角坐标系中,点A(-1,3)关于原点对称的点AO的坐标是.
如图是一块梯形铁片的残余部分,量得∠A=100º,则梯形残缺底角的度数是 .
如果向东走5m记作+5m,那么向西走3m记作m.
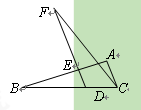
如图,△ABC的面积为63,D是BC上的一点,且BD∶CD=2∶1,DE∥AC交AB于点E,延长DE到F,使FE∶ED=2∶1,则△CDF的面积为.
在完全相同的四张卡片上分别写有如下四个命题:①半圆所对的弦是直径;②圆 既是轴对称图形,又是中心对称图形;③弦的垂线一定经过这条弦所在圆的圆心;④圆内接 四边形的对角互补.把这四张卡片放入一个不透明的口袋内搅匀,从口袋内任取一张卡片, 则取出卡片上的命题是真命题的概率为.
 单位,到达B点后观察到原点O在它的南偏东60°的方向上,则原来A的坐标为 .(结果保留根号)
单位,到达B点后观察到原点O在它的南偏东60°的方向上,则原来A的坐标为 .(结果保留根号)

 粤公网安备 44130202000953号
粤公网安备 44130202000953号