
相关试题
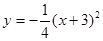
 轴对称.
轴对称. ∥
∥ 轴,
轴, ,最低点
,最低点 在
在 ,则右轮廓线
,则右轮廓线 所在抛物线的函数解析式为( )
所在抛物线的函数解析式为( )



如图,AD为⊙ 的直径,作⊙的内接正三角形ABC.甲、乙两人的作法分别如下:
的直径,作⊙的内接正三角形ABC.甲、乙两人的作法分别如下:

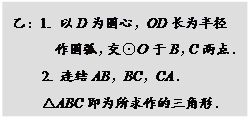
对于甲、乙两人的作法,可判断( )
A.甲、乙均正确 B.甲、乙均错误
C.甲正确,乙错误 D.甲错误,乙正确
 的边
的边 在
在 轴的负半轴上,双曲线
轴的负半轴上,双曲线 过
过 的中点
的中点 ,已知等边三角形的边长是4,则该双曲线的表达式为( )
,已知等边三角形的边长是4,则该双曲线的表达式为( )









 的图象向左平移1个单位,再向上平移2个单位后,所得图象的函数表达式是( )
的图象向左平移1个单位,再向上平移2个单位后,所得图象的函数表达式是( )



相关知识点
推荐套卷
如图,AD为⊙的直径,作⊙的内接正三角形ABC.甲、乙两人的作法分别如下:
对于甲、乙两人的作法,可判断( )
A.甲、乙均正确 B.甲、乙均错误
C.甲正确,乙错误 D.甲错误,乙正确
 粤公网安备 44130202000953号
粤公网安备 44130202000953号