如图,在直角坐标系中,已知点P0的坐标为(1,0),进行如下操作:将线段OPo按逆时针方向旋转 ,再将其长度伸长为OP0的2倍,得到线段OP1 ;又将线段OP1按逆时针方向旋转,长度伸长为OP1的2倍,得到线段OP2,如此重复操作下去,得到线段OP3,OP4,
,再将其长度伸长为OP0的2倍,得到线段OP1 ;又将线段OP1按逆时针方向旋转,长度伸长为OP1的2倍,得到线段OP2,如此重复操作下去,得到线段OP3,OP4, , 则
, 则
(1)点P5的坐标为
(2)落在x轴正半轴上的点Pn坐标是 ,( n是8的整数倍.)
相关试题
为庆祝十一国庆节,八年级(1)班同学要在广场上布置一个矩形的花坛,计划用“串红”摆成两条对角线,如果一条对角线用了38盆“串红”,那么还需从花房运来_________盆“串红”; 如果一条对角线用了49盆“串红”,那么还需从花房运来_________盆“串红”。
 ,PE⊥PB交CD于点E,则PE =____________.
,PE⊥PB交CD于点E,则PE =____________.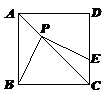
 ,
, ,
, ,根据以上提供的信息,你认为生产螺丝的质量最好的是_____________机床.
,根据以上提供的信息,你认为生产螺丝的质量最好的是_____________机床.相关知识点
推荐套卷
 粤公网安备 44130202000953号
粤公网安备 44130202000953号