
相关试题
4月9日上午8时,2017徐州国际马拉松赛鸣枪开跑,一名34岁的男子带着他的两个孩子一同参加了比赛,下面是两个孩子与记者的对话:
根据对话内容,请你用方程的知识帮记者求出哥哥和妹妹的年龄.
一个不透明的口袋中装有4张卡片,卡片上分别标有数字1, , ,7,这些卡片除数字外都相同.小芳从口袋中随机抽取一张卡片,小明再从剩余的三张卡片中随机抽取一张,请你用画树状图或列表的方法,求两人抽到的数字符号相同的概率.
某校园文学社为了解本校学生对本社一种报纸四个版面的喜欢情况,随机抽查部分学生做了一次问卷调查,要求学生选出自己最喜欢的一个版面,将调查数据进行了整理、绘制成部分统计图如下:
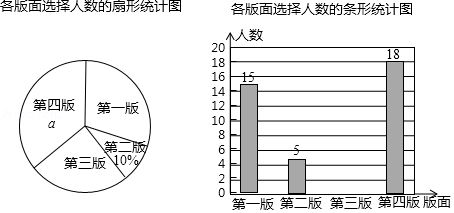
请根据图中信息,解答下列问题:
(1)该调查的样本容量为 , ,“第一版”对应扇形的圆心角为 ;
(2)请你补全条形统计图;
(3)若该校有1000名学生,请你估计全校学生中最喜欢“第三版”的人数.
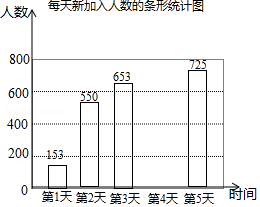
某数学学习网站为吸引更多人注册加入,举行了一个为期5天的推广活动,在活动期间,加入该网站的人数变化情况如下表所示:
|
时间 |
第1天 |
第2天 |
第3天 |
第4天 |
第5天 |
|
新加入人数(人 |
153 |
550 |
653 |
|
725 |
|
累计总人数(人 |
3353 |
3903 |
|
5156 |
5881 |
(1)表格中 , ;
(2)请把下面的条形统计图补充完整;
(3)根据以上信息,下列说法正确的是 (只要填写正确说法前的序号).
①在活动之前,该网站已有3200人加入;
②在活动期间,每天新加入人数逐天递增;
③在活动期间,该网站新加入的总人数为2528人.
相关知识点
推荐套卷
 粤公网安备 44130202000953号
粤公网安备 44130202000953号