根据指令[s,A] (s≥0, 0○<A<180○), 机器人在平面上能完成下列动作: 先原地逆时针旋转角度A, 再朝其面对的方向沿直线行走距离s. 现机器人在直角坐标系的坐标原点, 且面对x轴正方向.
(1)若给机器人下了一个指令[6,60○],则机器人应移动到点 ;
(2)请你给机器人下一个指令 , 使其移动到点 (-4,4).
相关试题
 的图象交于A(x1,y1)、B(x2,y2)两点,则2x1y2+3x2y1= .
的图象交于A(x1,y1)、B(x2,y2)两点,则2x1y2+3x2y1= .已知正比例函数y=kx与反比例函数y= 相交于点A(1,b)、点B(c,﹣2),求k+a的值.甲同学说:未知数太多,很难求的;乙同学说:可能不是用待定系数法来求;丙说:如果用数形结合的方法,利用两交点在坐标系中位置的特殊性,可以试试.请结合他们的讨论求出k+a= .
相交于点A(1,b)、点B(c,﹣2),求k+a的值.甲同学说:未知数太多,很难求的;乙同学说:可能不是用待定系数法来求;丙说:如果用数形结合的方法,利用两交点在坐标系中位置的特殊性,可以试试.请结合他们的讨论求出k+a= .
 上,B、D在双曲线y2=
上,B、D在双曲线y2= 上,k1=2k2(k1>0),AB∥y轴,S▱ABCD=24,则k1= .
上,k1=2k2(k1>0),AB∥y轴,S▱ABCD=24,则k1= .
如图,点A在双曲线y= 的第一象限的那一支上,AB垂直于y轴于点B,点C在x轴正半轴上,且OC=2AB,点E在线段AC上,且AE=3EC,点D为OB的中点,若△ADE的面积为3,则k的值为 .
的第一象限的那一支上,AB垂直于y轴于点B,点C在x轴正半轴上,且OC=2AB,点E在线段AC上,且AE=3EC,点D为OB的中点,若△ADE的面积为3,则k的值为 .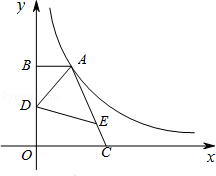
 的图象交于点P1、P2、P3、P4、P5…,并设△OA1P1、△A1A2P2、△A2A3P3…面积分别为S1、S2、S3…,按此作法进行下去,则Sn的值为 (n为正整数).
的图象交于点P1、P2、P3、P4、P5…,并设△OA1P1、△A1A2P2、△A2A3P3…面积分别为S1、S2、S3…,按此作法进行下去,则Sn的值为 (n为正整数).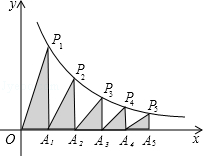
相关知识点
推荐套卷
 粤公网安备 44130202000953号
粤公网安备 44130202000953号