根据指令[s,A] (s≥0, 0º<A<180º), 机器人在平面上能完成下列动作: 先原地逆时针旋转角度A, 再朝其面对的方向沿直线行走距离s. 现机器人在直角坐标系的坐标原点, 且面对x轴正方向. (1) 若给机器人下了一个指令[4,600],则机器人应移动到点____; (2 ) 请你给机器人下一个指令 ____, 使其移动到点
) 请你给机器人下一个指令 ____, 使其移动到点 (-5,5).
(-5,5).
相关试题
如图是二次函数 图象的一部分,图象过点
图象的一部分,图象过点 (3,0),且对称轴为
(3,0),且对称轴为 ,给出下列四个结论:①
,给出下列四个结论:① ;②
;② ;③
;③ ;④
;④ ,其中正确结论的序号是___________.(把你认为正确的序号都写上)
,其中正确结论的序号是___________.(把你认为正确的序号都写上)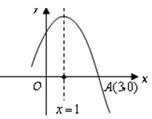
 向左平移1个单位,然后向下平移3个单位,则平移后抛物线的解析式为________.
向左平移1个单位,然后向下平移3个单位,则平移后抛物线的解析式为________.
 ,则
,则 =_____________.
=_____________.相关知识点
推荐套卷
 粤公网安备 44130202000953号
粤公网安备 44130202000953号