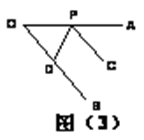
如图(3)所示,已知∠AOB=50°,PC∥OB,PD平分∠OPC,则∠APC= °,∠PDO= °
分解因式:▲.
已知等腰三角形的一个外角为110°,则与其不相邻的两个内角的度数是__________.
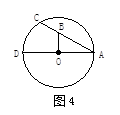
如图4,AD和AC分别是⊙O的直径和弦,且∠CAD=30°,OB⊥AD,交AC于点B,若OB=3,则BC=________.
如图3,直线y=kx+b经过点A(-1,1)和点B(-4,0),则不等式0<kx+b<-x的解集为_________.
从分别写有1,2,3,4的四张卡片中随机地抽取一张后不放回,再随机地抽取一张,那么第二次取出的数能整除第一次取出的数的概率是_______.

 ▲.
▲.
 粤公网安备 44130202000953号
粤公网安备 44130202000953号