如下图所示,小红在研究“杠杆平衡条件”的实验中所用的器材有:杠杆、支架、刻度尺、细线和若干个质量相同的钩码。
(1)在实验过程中,杠杆调在水平位置平衡的目的为了方便测量 。
(2)杠杆调节平衡后,小红在杠杆上A点处挂4个钩码,为使杠杆重新平衡,应在B点挂 个钩码。
(3)小红按现有方案得出如下结论:“动力×支点到动力作用点的距离=阻力×支点到阻力作用点的距离”。这个结论与杠杆平衡条件不符,原因是实验过程中 (填字母).
| A.没有改变力的大小 | B.没有改变力的方向 |
| C.没有改变力的作用点 | D.实验次数较少,结论具有偶然性 |
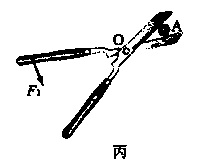
(1)如图1,请在杠杆A处画出把物体拉起时的最小拉力F1,并画出拉力F1的力臂L1.
(2)请在图2中画出光线AO的折射光线和BC的入射光线.
(3)如图3中是一般家庭的卫生间都安装照明灯和换气扇.使用时,要求它们各自独立工作.按上述要求,在虚线框内画出电路图(电源用符号“﹣○220V○﹣”表示,已经画在图中了;换气扇用符号 表示)
表示)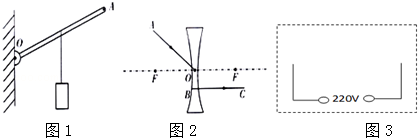
用细绳系住厚度不均匀的木板的O处,木板恰好处于静止状态,且上表面保持水平。如图所示,两玩具车同时从O点附近分别向木板的两端匀速运动,要使木板在此过程始终保持平衡,必须满足的条件是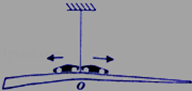
| A.两车的质量相等 | B.两车的速度大小相等 |
| C.质量较小的车速度较大 | D.两车同时到达木板两端 |
如图是某小组同学测量斜面机械效率的实验装置.实验时,用木块将带有刻度的平木板垫起,构成一个斜面.
(1)用弹簧测力计拉着小车从底端位置A沿斜面匀速运动到位置B,弹簧测力计的示数为1.1N,此时斜面的机械效率为 .
(2)若将木块向右移,使木块左端与长木板90cm处对齐,重复(1)中的实验,弹簧测力计的示数为0.8N,此时斜面的机械效率为 .比较(1)、(2)可知,斜面的机械效率与斜面的 有关.
(3)若将小车四轮朝上倒置.重复(2)中的实验,则弹簧测力计示数变 ,机械效率变 .比较(2)、(3)可知,斜面的机械效率与接触面的 有关.
小芬同学“探究杠杆的平衡条件”的实验装置如图所示,请回答下列问题:
(1)实验前先要调节杠杆两端的螺母,使其在 平衡,目的是 。如果小芬同学做实验时发现杠杆左高右低,则她应将杠杆左端的螺母向 调,或将杠杆右端的螺母向 调。
(2)小芬同学根据图示实验装置测得的一组数据,得出了“动力+动力臂=阻力+阻力臂”的错误结论,你认为小芬同学在探究中存在的问题是:
① ;
② 。
(3)图示装置中的杠杆处于静止状态,若小芬同学在杠杆两侧各增加一个钩码(每个钩码的质量相同),则( )
| A.杠杆仍在图示位置静止 | B.杠杆将顺时针方向转动 |
| C.杠杆将逆时针方向转动 | D.以上三种情况都有可能 |
(4)如果小芬同学将杠杆支点右侧的钩码全部拿走,改用弹簧测力计拉着杠杆支点的左侧,则必须 、 地拉住弹簧测力计才能使实验顺利进行。
小明利用铁架台、带有最小刻度为1cm的杠杆、细线、若干钩码等实验装置探究杠杆的平衡条件.
(1)在挂钩码前,小明发现杠杆左端高,右端低(如图甲),他应将杠杆两端的平衡螺母向 调节(选填“左”或“右”),使杠杆在水平位置平衡.
(2)接着小明在杠杆的两端挂上不同数量的钩码,移动钩码的位置,保持杠杆在水平位置平衡.则杠杆两侧受到的作用力大小 (选填“大于”、“等于”或“小于”)各自钩码所受重力大小.设右侧钩码对杠杆施的力为动力F1,则动力臂l1大小(如图乙)为 cm.
(3)改变钩码数量与位置,获取多组测量数据,填入记录表中,根据表中的数据得出杠杆的平衡条件是:F1l1=F2l2,据此,实验测量数据记录表中第三次实验中的空格应填 .
实验测量数据记录表:
| 实验次序 |
动力F1/N |
动力臂l1/cm |
阻力F2/N |
阻力臂l2/cm |
| 1 |
2.0 |
5.0 |
1.0 |
10.0 |
| 2 |
2.0 |
10.0 |
2.0 |
10.0 |
| 3 |
2.0 |
15.0 |
3.0 |
|
| … |
… |
… |
… |
… |
(4)测量多组数据的目的是 (选填“减小实验误差”或“避免实验错误”).
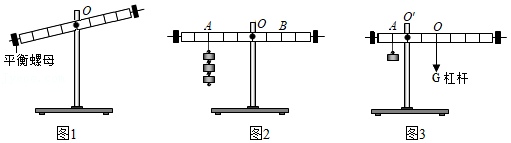
如图所示,杠杆AOB的A端挂重为GA的物体,B端挂重为GB的物体,杠杆平衡时AO处于水平位置,若AO=BO,杠杆自重不计,则GA和GB的大小关系是:( )
| A.GA>GB | B.GA=GB | C.GA<GB | D.无法比较 |
在探究"杠杆的平衡条件"实验时。
(1)实验前,将杠杆置于支架上,当杠杆静止时,发现左端下沉,如图1所示,此时,应把杠杆的平衡螺母向 (选填"左"或"右")调节,直至杠杆在 (选填"任意"或"水平")位置平衡;
(2)调节平衡后,在杠杆上A点处挂两个钩码,如图2所示,则在B点处应挂 个钩码,才能使杠杆在原位置平衡。在A、B两点各增加1个的钩码,则杠杆 (选填"能"或"不能")保持平衡;
(3)为了使实验结论具有 (选填"普遍性"或"偶然性"),应改变钩码个数及悬挂位置,多次进行实验;
(4)实验时,不再调节平衡螺母,使杠杆的重心位置保持在O点不变,将支点换到O′点,如图3所示,发现A点处只挂1个钩码,杠杆仍然保持平衡。若每个钩码重为0.5N,则杠杆重力为 N。由此可知,将杠杆支点位置设在 (选填"O"或"O'")点进行实验,能避免杠杆自身重力影响实验结论"动力×动力臂=阻力×阻力臂"的得出。
小锦小组用刻度均匀的匀质杠杆进行“探究杠杆平衡条件”的实验中,每个钩码质量相等。
(1)将杠杆的中点置于支架上,当杠杆静止时,发现杠杆左端下沉,他将杠杆左端平衡螺母向右调节到最大限度后,杠杆左端仍有轻微下沉,这时他应将右端的平衡螺母向 端调节,才能使杠杆在水平位置平衡。
(2)如图甲所示,是他在探究过程中的一个情境,接下来他在两边钩码的下方各加一个相同的钩码,并将左端钩码移到左端离支点第三格处,为了使杠杆在水平位置平衡,他应将右端钩码移动到右端离支点第 格处。

(3)通过不断改变两端所挂钩码的个数和位置,使杠杆在水平位置平衡,并记录各次实验数据,通过对数据分析后得出结论:动力×支点到动力作用点的距离=阻力×支点到阻力作用点的距离。与其他小组交流后,他们又做了如图乙、丙、丁三次实验,其中 图所示实验能直接说明该结论是错误的。
如图所示是正在工作的挖掘机,下列说法错误的是( )
| A.机械臂A被液面压杆撑起时,相当于省力杠杆 |
| B.挖掘机的两条履带,可以减小挖掘机对地面的压强 |
| C.挖掘臂水平转动时,挖掘铲内土的重力没有做功 |
| D.挖掘铲的前端做成齿状,是为了增大压强 |
如图所示,质量不计的轻板AB可绕转轴O在竖直面内转动,OA=0.4m,OB=1.6m.地面上质量为15kg、横截面积为0.3m2的圆柱体通过绳子与A端相连.现有大小不计、重为50N的物体在水平拉力F=10N的作用下,以速度v=0.2m/s从O点沿板面向右作匀速直线运动.g=10N/kg.求: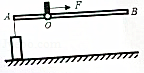
(1)物体开始运动前,圆柱体对地面的压强;
(2)物体在板面上运动的时间;
(3)物体在板面上运动过程中,拉力F做的功及功率.



 粤公网安备 44130202000953号
粤公网安备 44130202000953号