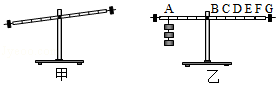
某同学想利用杠杆的平衡条件来测量刻度尺的质量.

⑴ 将刻度尺平放在支座上,左右移动刻度尺,找出能够使刻度尺在水平位置保持平衡的支点位置,记下这个位置,它就是刻度尺的重心;
⑵ 如图所示,将质量为M的物体挂在刻度尺左边某一位置,移动刻度尺,直到刻度尺能够在支座上重新保持水平平衡.记录物体悬挂点到支座的距离L1和刻度尺的 到支座的距离L2;
⑶ 根据杠杆的平衡条件,可以计算出刻度尺的质量m = (用题目中所给物理量表示).
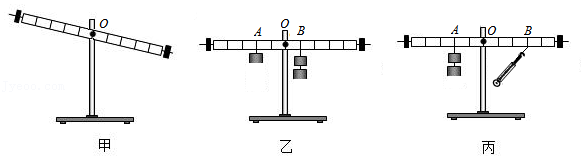
小红和小明利用如图所示装置探究杠杆的平衡条件。

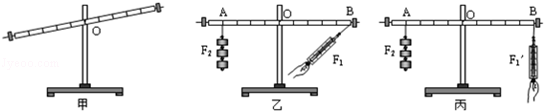
(1)若实验前杠杆如图甲所示,可将杠杆两端的平衡螺母向 (填"左"或"右")调节,使杠杆在水平位置平衡。
(2)在实验过程中,调节杠杆在水平位置平衡的目的是 。
(3)在杠杆两端加挂钩码,并移动钩码,使杠杆在水平位置平衡,测出力臂,多次实验并把数据记录在表格中。
| 次数 |
F 1/N |
L 1/cm |
F 2/N |
L 2/cm |
| 1 |
1 |
10 |
2 |
5 |
| 2 |
2 |
10 |
1 |
20 |
| 3 |
2 |
15 |
3 |
10 |
多次实验的目的是 。
(4)小明根提以上数据得出杠杆平衡条件是 。
(5)杠杆调节平衡后,小红在杠杆上的A点处挂4个钩码,如图乙所示,为使杠杆重新平衡,应在B点挂 个钩码。
(6)如图丙所示,用弹簧测力计在C处竖直向上拉,使杠杆在水平位置平衡,当弹簧测力计在原位置逐渐向右倾斜时,使杠杆仍然在水平位置平衡,则弹簧测力计的示数
将 (填"变大"、"变小"或"不变")。
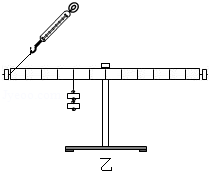
用如图所示的实验装置测量杠杆的机械效率.实验时,竖直向上匀速拉动弹簧测力计,使挂在较长杠杆下面的钩码缓缓上升.

(1)实验中,将杠杆拉至图中虚线位置,测力计的示数F为 N,钩码总重G为1.0N,钩码上升高度h为0.1m,测力计移动距离s为0.4m,则杠杆的机械效率为 .请写出使用该杠杆做额外功的一个原因: .
(2)为了进一步研究杠杆的机械效率与哪些因素有关,一位同学用该实验装置,先后将钩码挂在A、B两点,测量并计算得到下表所示的两组数据:
| 次数 |
钩码悬挂点 |
钩码总重G/N |
钩码移动距离h/m |
拉力F/N |
测力计移动距离s/m |
机械效率η/% |
| 1 |
A点 |
1.5 |
0.10 |
0.7 |
0.30 |
71.4 |
| 2 |
B点 |
2.0 |
0.15 |
1.2 |
0.30 |
83.3 |
根据表中数据,能否得出“杠杆的机械效率与所挂钩码的重有关,钩码越重其效率越高”的结论?答: ;请简要说明理由: .
实验探究:探究杠杆的平衡条件
数据 |
如图甲,利用钩码和刻度尺测量出杠杆平衡时各个力及其力臂,测得数据如下表:
|
||||||||||||||||||||
结论 作图 |
①杠杆的平衡条件是 。 ②实验进行3次的目的是 (只有1个选项正确,填写对应字母)。 .取平均值减小误差 .使每组数据更准确 .归纳出物理规律 ③如图乙,若用弹簧测力计的拉力作动力,进行实验,请画出其动力臂。
|
小华和小明一起做探究杠杆平衡条件的实验
(1)实验前,将杠杆的中点置于支架上,当杠杆静止时发现杠杆停在如图甲所示的位置。小华将左端的平衡螺母向右调,小明认为也可以将右端的平衡螺母向 调(选填“右”或“左”),使杠杆在水平位置平衡。他们调节杠杆在水平位置平衡的主要目的是 。

(2)在杠杆的两端加挂钩码,并移动钩码,使杠杆在水平位置平衡,如图乙所示,并测出力臂。多次实验并把数据记录在表格中。
| 次数 |
F1/N |
l1/cm |
F2/N |
l2/cm |
| 1 |
1 |
10 |
2 |
5 |
| 2 |
2 |
10 |
1 |
20 |
| 3 |
2 |
15 |
3 |
10 |
实验时杠杆在水平位置平衡的目的是: ;
多次实验的目的是: 。
(3)小华根据以上数据得出杠杆平衡的条件是: 。
(4)小明将图乙中杠杆两侧的钩码各增加一个,杠杆会 (选填“右侧下降”或“左侧下降”)。
(5)若小华只将图乙中的杠杆左侧的两个钩码取下,要使杠杆重新在水平位置平衡,应将右侧钩码
(说出钩码移动的方向及格数)。
在探究杠杆的平衡条件的实验中,
(1)如图甲所示,为了使杠杆在水平位置平衡,应该向 移动右端的螺母(选填“左”或“右”)。
(2)实验时只有10个相同的钩码,杠杆上每格等距,当在A点挂3个钩码时,如图乙所示,则怎样挂钩码可以使杠杆在水平位置平衡?(请设计两种方案)
① ;
② 。
(3)通过对实验数据进行分析处理,可得出结论:杠杆平衡条件是 。
在“探究杠杆平衡条件”的实验中,把杠杆的中点支在支架上,杠杆停在如图甲所示的位置.

(1)为了使杠杆在水平位置平衡,可以调节右端的平衡螺母,使它向 (填“左”或“右”)移动.
(2)调节好的杠杆,如图乙,用弹簧测力向上拉动杠杆使其水平平衡,若每个钩码重为2N,则弹簧测力计的读数为 N.
(3)如图丙,当弹簧测力计由M位置倾斜至N位置时,用力使杠杆在水平位置处于平衡,弹簧测力计的示数将会变 ,这是因为 .
(4)实验中测得的数据如表所示
| 测量序号 |
动力F1/N |
动力臂l1/cm |
阻力F2/N |
阻力臂l2/cm |
| ① |
1 |
20 |
2 |
10 |
| ② |
2 |
15 |
1.5 |
20 |
| ③ |
3 |
5 |
1 |
15 |
有的同学按现有方案得出如下结论“动力×支点到动力作用点的距离=阻力×支点到阻力作用点的距离.”这个结论与杠杆平衡条件不符,原因是实验过程中 .
A.没有改变力的大小
B.没有改变力的方向
C.没有改变力的作用点
D.没有改变平衡螺母的位置从而让杠杆在水平位置重新平衡.
探究杠杆的平衡条件
猜想与假设】
猜想一:动力 动力臂 阻力 阻力臂
猜想二:动力 支点到动力作用点的距离 阻力 支点到阻力作用点的距离
【设计实验与进行实验】
(1)如图甲所示,应将杠杆两端的螺母向 (选填"左"或"右" 调节,使杠杆在水平位置平衡。
(2)如图乙所示,小明同学挂上钩码并调节钩码的位置,使杠杆水平平衡,记录的数据如表。
(3)改变钩码的 和钩码的位置重复上述实验两次,记录的数据如表。
| 实验次数 |
动力 |
间距离 |
阻力 |
间距离 |
|
| 小明 |
1 |
1.0 |
5 |
0.5 |
10 |
| 2 |
1.5 |
10 |
1.0 |
15 |
|
| 3 |
1.0 |
10 |
2.0 |
5 |
|
| 小红和小明 |
4 |
0.8 |
15 |
1.0 |
10 |
| 5 |
1.4 |
15 |
1.0 |
10 |
|
【分析与论证】
根据小明同学的数据可验证猜想 (选填"一"、"二"或"一和二" 是正确的。而小红同学则认为小明同学每组数据中的力臂恰好都等于支点到力的作用点的距离,具有一定的特殊性,还应改变动力或阻力的 进行实验。
于是,小红同学协助小明同学按图丙方式进行实验,获得表中后两组数据。综合分析表中数据可验证猜想 是错误的。若要验证另一种猜想是否正确,必须添加的测量工具是 。
通过以上探究,小明同学真正理解了力臂是支点到 的距离。
在“探究杠杆的平衡条件”实验中:
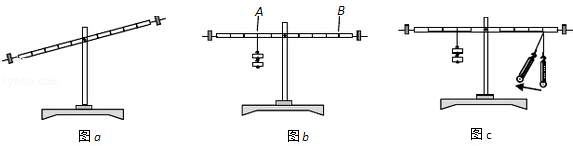
(1)如图a所示,为使杠杆在水平位置平衡,应将杠杆右端的平衡螺母向 旋(选填“左“或“右”).
(2)如图b所示,在A位置上挂两个相同钩码,应该在B位置挂上 个同样的钩码,才能使杠杆在水平位置平衡.
(3)如图c所示,弹簧测力计由竖直方向逐渐向左转动,杠杆始终保持水平平衡,则弹簧测力计的示数将 (选填“变大”、“变小”或“不变”).
(4)使用杠杆能为我们的生活带来方便.如图d所示,下列杠杆能够省距离的是 .

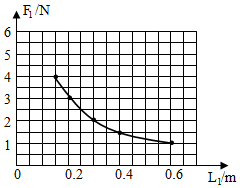
小明利用刻度均匀的匀质杠杆做探究"杠杆的平衡条件"实验。
(1)实验前,将杠杆的中点置于支架上,当杠杆静止时,发现杠杆右端下沉,这时应将平衡螺母向 (填"左"或"右")端调节,直到杠杆在水平位置平衡。
(2)得出杠杆的平衡条件"动力×动力臂=阻力×阻力臂"后,小明又进一步探究杠杆平衡时动力和动力臂的关系。实验过程中,保持阻力和阻力臂不变,在杠杆水平平衡时,测出多组动力F 1和动力臂L 1的数据,并绘制了F 1与L 1的关系图象,如图所示,请根据图象推算,当L 1为0.1m时,F 1为 N。
如图1所示,某小组研究“杠杆的平衡条件”,器材:有刻度的杠杆、若干个相同的钩码、弹簧测力计等,O为杠杆的支点.

(1)实验前,应先调节杠杆在 位置平衡.这样做,除了可以消除自身的重力影响,还可以方便地测量或读出 .调节时,如发现杠杆左端偏高,应如何操作: .
(2)某实验小组记录两组数据如下:
| 实验序号 |
动力F1/N |
动力臂l1/cm |
阻力F |
2/N |
阻力臂l2/cm |
| 1 |
2 |
20 |
1 |
10 |
|
| 2 |
1 |
8 |
2 |
4 |
|
根据分析,这组数据中,实验序号为 (选填:“1”或“2”)的一组肯定有错误.检查发现是测量动力臂时读错了,动力臂的实际值比记录值 (选填:大或小).
(3)如图2所示,弹簧测力计在C处由竖直向上逐渐向右倾斜拉动杠杆,仍使杠杆在水平位置保持平衡,则弹簧测力计的示数将 (选填:变大、变小或保持不变),其原因是 .
(4)某次实验中,若采取如图3所示的方式悬挂钩码,杠杆也能在水平位置保持平衡(杠杆上每格等距),但老师却往往提醒大家不要采用这种方式,这主要是以下哪种原因 (选填字母).
A.一个人无法独立操作 B.需要使用太多的钩码
C.力臂与杠杆不重合 D.力和力臂数目过多
(5)如图4所示,实验小组选用长1.6m、粗细均匀的一只金属杆,绕O点在竖直平面内自由转动,同时将一个“拉力﹣﹣位移传感器”竖直作用在杆上,并使杠杆在水平位置始终保持平衡.该传感器显示其拉力F与作用点到O点距离x的变化关系如图5所示.由图可知金属杆重 N.
小明在复习探究杠杆平衡条件实验时:
(1)实验前应调节杠杆两端的平衡螺母,使杠杆在水平位置平衡。这样做的好处是 ;
(2)调节完毕后,在杠杆A 点挂3 个相同的钩码如图甲所示,在杠杆B 点应挂 个相同的钩码才能使杠杆恢复在水平位置平衡。若将A、B两点下方所挂钩码各取下一个,那么杠杆 (选填“左或“右)端下降;
(3)小明测出一组数据后就得出了“动力×动力臂=阻力×阻力臂”的结论。同组的同学认为他的做法不合理,理由是 ;
(4)测定油箱油量的装置应用了杠杆如识( 如图乙),当油面下降时,变阻器R 连入电路的阻值将 (选填“变大”、“不变”或“变小”)。若将图中电流表换成电压表表示油量的多少,则电压表接在 (选填“R0”或“R”)两端时,电压表示数越大,表示油量越多。

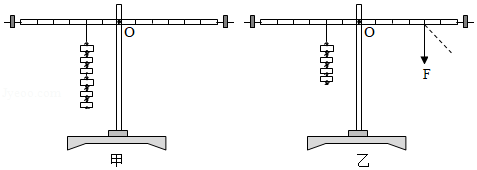
在“探究杠杆的平衡条件”的实验中:
(1)在实验前,要求杠杆在水平位置平衡的目的是 .小王同学把杠杆放在支架后,在没有挂钩码时杠杆的平衡位置如图(甲)所示.为使杠杆在水平位置平衡,应将杠杆右端螺母向 边旋一些(左/右).
(2)调好后,第一组按图(乙)进行实验,第二组按图(丙)进行实验.你认为第 组实验更好.
(3)小王的实验数据如表:
| 动力F1/N |
动力臂L1/m |
阻力F2/N |
阻力臂L2/m |
| 3 |
0.2 |
2.4 |
0.25 |
根据实验数据分析,可得出杠杆的平衡条件:动力×动力臂=阻力×阻力臂
分析小王所做实验存在不足,原因是 .
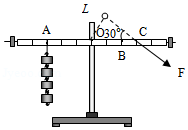
在探究“杠杆的平衡条件”的实验中,采用如图所示的装置。
(1)实验时应先调节平衡螺母,使杠杆在 位置平衡。
(2)若不计杠杆质量和摩擦且杠杆刻度均匀,每个钩码的重力都是0.5N,在A点挂四个钩码时,在B点应挂 个钩码,杠杆才能恢复平衡。
(3)若A位置所挂钩码不变,取掉B位置的钩码,在C位置施加一个如图所示的力F,则这个力的大小等于 N时,杠杆仍然保持平衡。
在“探究杠杆平衡条件”实验时,实验中所用钩码的质量均为 。
(1)实验前,应先调节杠杆在水平位置平衡。若向右调节杠杆两端的 时,可使杠杆在水平位置平衡,则调节前,杠杆 (选填“左”或“右” 端偏低;
(2)如图甲,当在杠杆左侧第2格处挂6个钩码,在右侧第3格处挂 个钩码(图中右侧钩码未画出)的时候,杠杆在水平位置平衡。此时,若将杠杆左右两侧所挂的钩码各向远离支点 的方向移动1个格,则杠杆 (选填“左”或“右” 端将下降;
(3)如图乙,当在杠杆左侧第2格处挂4个钩码,在杠杆的右侧用竖直向下的拉力 作用时,杠杆在水平位置平衡。若使杠杆继续在水平位置保持平衡,将拉力方向旋转到图中虚线位置时,拉力 的力臂将 ,拉力 的大小将 (两空都选填“变大”、“变小”或“不变” 。
 粤公网安备 44130202000953号
粤公网安备 44130202000953号