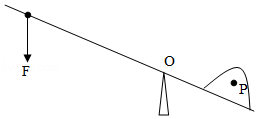
如图所示的撬棒,O为支点,P为石头的重心。请画出动力F的力臂l和石头所受重力G的示意图。
(6分)
(1)如图甲所示,用螺丝刀撬起图钉,请在图上画出螺丝刀受到图钉阻力F2的力臂L2;并画出作用在螺丝刀柄上A点的最小动力F1的示意图。
(2)如图乙所示,杠杆在力F1、F2作用下处于平衡状态,L1为F1的力臂。请在图中作出F2的力臂L2及力F1。
(3)如图丙所示,一个站在地面上的工人利用滑轮组将重物G提起来,请画出滑轮组的绕线。
|

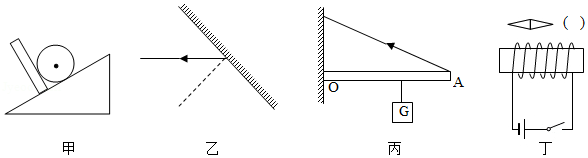
按要求作图:
(1)甲图中的小球静止在斜面上,请画出小球所受重力的示意图;
(2)请在乙图中画出反射光线对应的入射光线;
(3)丙图中, 是杠杆 的支点,请画出拉力 的力臂;
(4)丁图是一通电螺线管,请在括号里标出静止小磁针的“ ”或“ ”极。
按照要求规范作图(作图时请用刻度尺)。
(1)图甲为某人用手托起一金属球时的情景,人的手臂相当于一个杠杆,支点为  ,球对手的压力为
,球对手的压力为  ,请画出
,请画出  的力臂
的力臂  ,
,
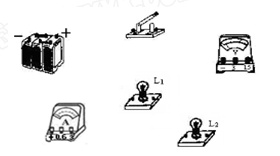
(2)如图乙所示,请将开关和灯泡正确连入家庭电路。

按照题目要求作图
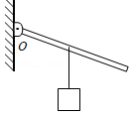
(1)在图中为使杠杆OA保持静止,画出在A点所加最小的力F1的示意图和阻力F2的力臂l2。
(2)在图中,一个站在地面上的工人利用滑轮组将重物G提起来,请在图中画出滑轮组的绕线。
(3)按图中的实物图在虚线框内画出对应的电路图。

如图所示,是同学们所画的几种情景下的示意图,其中正确的是
A.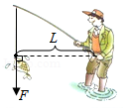 作用在鱼竿上的阻力及其力臂
作用在鱼竿上的阻力及其力臂
B. 从岸上看水中鱼的光路图
从岸上看水中鱼的光路图
C.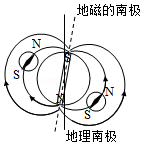 地磁场方向及小磁针静止时的指向
地磁场方向及小磁针静止时的指向
D.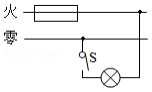 家庭电路的部分连线情况
家庭电路的部分连线情况
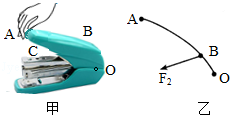
如图甲是打开订书器准备装入钉书钉的情景,其工作臂OBA可看成一根绕O点转动的杠杆,简化示意图如图乙所示,F2为拉杆BC对工作臂的阻力。请在乙图中画出杠杆平衡时的阻力臂l2、作用在A点的最小动力F1和动力臂l1。
在图中,画出杠杆平衡时施加在杠杆上的最小动力F 1的作用点和方向,并画出所挂重物的绳子对杠杆拉力的力臂L 2。
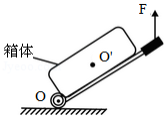
如图是静止在水平地面上的拉杆旅行箱的示意图, 是轮子的转轴, 是箱体的重心。以 为支点,画出力 的力臂和箱体所受重力的示意图。
如图所示是液压汽车起重机的示意图,液压杆对吊臂的作用力在A点且方向可以调节,
画出此时液压杆作用在吊臂上的最小力F1、力臂L1及吊臂所受阻力F2。

作图题(每图2分,共6分)
(1)如图所示的钢丝钳,其中A是剪钢丝处,B为手的用力点,O为转动轴(支点),右图为单侧钳柄及相连部分示意图.请在右图中画出钢丝钳剪钢丝时的动力臂L1和阻力F2。
(2)通过图示滑轮组向上提升重物,请画出最省力的绕绳方法。
(3)请在图中画出用此杠杆提升物体时的最小力的示意图(O为支点)
作图:①如图所示,用滑轮组提升重物,请在图中画出最省力的绕线方法。
②如图所示,用一根硬棒撬一个大石块,棒的上端A是动力作用点.若用最小的力撬动石块,请标出此时杠杆的支点O并画出最小力F及动力臂L.
③如图所示,轻质杠杆可绕O转动,杠杆上吊一重物G,在动力F作用下,杠杆静止在水平位置,图中为F的力臂,请在图中作出动力F及阻力臂L/的示意图(温馨提示:注意标明力F的方向和作用点)。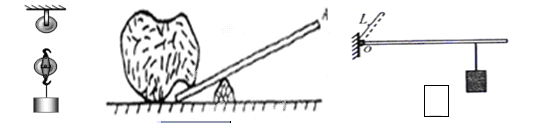
不计自重的钓鱼杆ABCD,在钓鱼时杆的前段CD部分自然弯曲,杆的后部ABC部分保持直线状态(情景如图甲)。物理模型分析图如图乙,一个金属鱼模型(重力FG=20N)系在钓鱼线DE的下端,当模型鱼浸没在水中静止时钓线的拉力FD=18N,此时杆ABC部分与水平面成30°角,钓鱼者一手握在B点,一手握在A端,A端到竖直钓线的距离AP=3.75m,钓鱼者对A端施加竖直向下的力记作FA,已知。
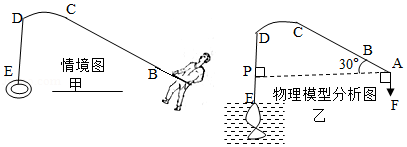
(1)求金属鱼模型所受到的浮力:
(2)将钓鱼杆ABCD当作杠杆研究,若以B点为支点,画出动力臂BA′(l1)和阻力臂BP′(l2),计算出FA的大小;
(3)若以A端为支点研究杠杆ABCD,判断人手对B点的“拉抬力”FB与钓线的拉力FD的大小关系并说明理由。



 粤公网安备 44130202000953号
粤公网安备 44130202000953号