如图所示为录音机工作时的示意图,带子的速度由主动轮来控制,轮1是卷带轮,轮2是送带轮,轮3、轮4是磁带盒内的两个转盘,空带一边半径为r1=1.0cm,满带一边半径为r2=2.5cm,已知主动轮转动的线速度不变,恒为6cm/s,试求: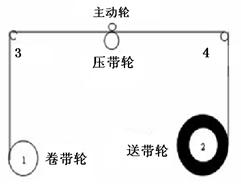
(1)卷带轮角速度的变化范围;
(2)当两边带子厚度相同时,卷带轮的角速度为多大?
如图甲所示,有一倾角为300的光滑固定斜面,斜面底端的水平面上放一质量为M的木板.开始时质量为m = 1kg的滑块在水平向左的力F作用下静止在斜面上,今将水平力F变为水平向右,当滑块滑到木板上时撤去力F,木块滑上木板的过程不考虑能量损失.此后滑块和木板在水平上运动的v-t图象如图乙所示,g=10 m/s2.求: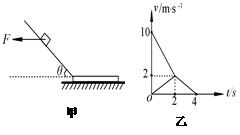
(1)水平作用力F的大小;
(2)滑块开始下滑时的高度;
(3)木板的质量。
“神舟”六号载人飞船在空中环绕地球做匀速圆周运动,某次经过赤道的正上空时,对应的经度为θ1,飞船绕地球转一圈后,又经过赤道的正上空,此时对应的经度为θ2(θ1、θ2均表示弧度).已知地球半径为R,地球表面的重力加速度为g,地球自转的周期为T0.求飞船运行的圆周轨道离地面高度h的表达式.(用θ1、θ2、T0、g和R表示).
如图所示,倾角θ=30°的固定斜面上固定着挡板,轻弹簧下端与挡板相连,弹簧处于原长时上端位于D点。用一根不可伸长的轻绳通过轻质光滑定滑轮连接物体A和B,使滑轮左侧绳子始终与斜面平行,初始时A位于斜面的C点,C、D两点间的距离为L。现由静止同时释放A、B,物体A沿斜面向下运动,将弹簧压缩到最短的位置为E点,D、E两点间距离为 。若A、B的质量分别为4m和m,A与斜面之间的动摩擦因数
。若A、B的质量分别为4m和m,A与斜面之间的动摩擦因数 ,不计空气阻力,重力加速度为g,整个过程中,轻绳始终处于伸直状态,则( )
,不计空气阻力,重力加速度为g,整个过程中,轻绳始终处于伸直状态,则( )

A.A在从C至E的过程中,先做匀加速运动,后做匀减速运动
B.A在从C至D的过程中,加速度大小
C.弹簧的最大弹性势能为
D.弹簧的最大弹性势能为
如图所示,电动机带动滚轮做逆时针匀速转动,在滚轮的摩擦力作用下,将一金属板从斜面底端A送往上部,已知斜面光滑且足够长,倾角 ,滚轮与金属板的切点B到斜面底端A的距离为L=6.5m,当金属板的下端运动到切点B处时,立即提起滚轮使它与板脱离接触.已知板之后返回斜面底部与挡板相撞后立即静止,此时放下滚轮再次压紧板,再次将板从最底端送往斜面上部,如此往复.已知板的质量为m=1×103kg,滚轮边缘线速度恒为
,滚轮与金属板的切点B到斜面底端A的距离为L=6.5m,当金属板的下端运动到切点B处时,立即提起滚轮使它与板脱离接触.已知板之后返回斜面底部与挡板相撞后立即静止,此时放下滚轮再次压紧板,再次将板从最底端送往斜面上部,如此往复.已知板的质量为m=1×103kg,滚轮边缘线速度恒为 ,滚轮对板的正压力FN=2×104N,滚轮与板间的动摩擦因数为
,滚轮对板的正压力FN=2×104N,滚轮与板间的动摩擦因数为 ,取g=10m/s2.求:
,取g=10m/s2.求:
(1)在滚轮作用下板上升的加速度;
(2)板加速至滚轮速度相同时前进的距离;
(3)板往复运动的周期.
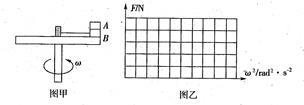
 =0.4,B与转盘间的动摩擦因素
=0.4,B与转盘间的动摩擦因素 =0.1,且可认为最大静摩擦力等于滑动摩擦力。转盘静止时,细线刚好伸直,力传感器的读数为零,当转盘以不同的角速度匀速转动时,力传感器上就会显示相应的读数F。试通过计算在图乙的坐标系中作出
=0.1,且可认为最大静摩擦力等于滑动摩擦力。转盘静止时,细线刚好伸直,力传感器的读数为零,当转盘以不同的角速度匀速转动时,力传感器上就会显示相应的读数F。试通过计算在图乙的坐标系中作出 的图象,g取
的图象,g取
 粤公网安备 44130202000953号
粤公网安备 44130202000953号