无人机以高分辨率高速摄像机、轻型光学相机、激光扫描仪等设备获取信息,广泛应用在航拍、交通管理等领域。如图为某型号无人机,整机质量2千克,停放时与水平地面总接触面积0.002米 ,摄像机拍摄速度11000帧 秒。在轿车限速120千米 时的某高速公路上,交警利用该无人机进行道路通行情况实时监测。 取
(1)无人机停放在水平地面时,对地面产生的压强 帕。
(2)无人机竖直向上爬升60米的过程中克服重力做了多少功?
(3)无人机在某轿车通行0.6米的过程中拍摄220帧,通过计算判断该轿车是否超速。

无人驾驶飞机简称"无人机",中国近年来在无人机制造方面进展神速。无人机的飞行控制系统简称"飞控"。无人机悬停还是飞行、向哪个方向飞行、上升还是下降等飞行指令都由"飞控"下达。"飞控"主要由感知飞行姿态的陀螺仪(控制飞行姿态)、 定位模块(与地面传递信息)超声波传感器(探测障碍物)、气压传感器(获取气压获知高度)等各种功能的传感器及控制电路组成。如图是我国制造的"翼龙"多用途无人机,该机表面采用的复合材料受力不易形变,飞机外形采用流线型设计,可携带各种侦察、测距、电子对抗设备及小型空对地打击武器,广泛应用于如灾情监视、军事活动等领域。
(1)请从短文描述中找出蕴含的物理知识。(至少二条,知识点不能重复)
举例:超声波传感器可探测无人机在飞行时遇到的障碍物,这是利用声波能够传递信息。
①
②
(2)经查阅资料获知,"翼龙"无人机机身质量 ,最大载荷质量 。当该机以最大载荷质量停在水平跑道上时,无人机轮胎与地面接触的总面积为 .求此时无人机对水平跑道的压强。
(3)飞机利用超声波传感器来判断离地高度。若某测距传感器的阻值
与离地高度
的关系如图甲所示,图乙是检测电路(电源电压不变),要使高度表(实质是电流表或电压表)示数能随飞行高度的增大而增大,则此高度表应该选用 (选填"电流表或电压表"
,应安装在 (选填"1或2或3"
位置,判断依据是: 。 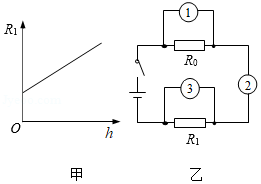

小明家里电热水壶坏了,他在网上查到两种外形基本相同的电热水壶的铭牌如表所示:
|
品牌1 |
品牌2 |
|||
|
产品型号: |
产品型号 |
产品型号: |
|
|
|
额定电压: |
|
额定电压: |
|
|
|
频率: |
|
频率: |
|
|
|
额定功率: |
|
额定功率: |
|
|
|
容量: |
|
容量: |
|
|
(1)用品牌2的电热水壶烧开一壶水用时6分钟,则电热水壶消耗了多少电能?
(2)小明认为"品牌1"这款电热水壶功率小,更省电。从节能的角度考虑,你认为他的这种想法合理吗?为什么?

 粤公网安备 44130202000953号
粤公网安备 44130202000953号