在探究“杠杆平衡条件”的实验中:
(1)如图(a)所示,在未挂钩码时,螺母A、B的作用是 。若实验前,没有挂钩码时,杠杆静止在图(b)所示位置,应进行的操作是 。
(2)实验中共有6个钩码,杠杆上每格距离相等,调节好杠杆后,在杠杆左边、离支点2格的P处挂有3个钩码,如图(c)所示,为使杠杆平衡,请在杠杆右边挂上钩码(用两种方法),你的方法是① ;② 。
(3)实验中改变支点两侧的钩码位置和个数,用同样的方法一般要做三次实验,得到三组数据并进行分析,这样做的目的是 。
(4)当小宇同学在拉着弹簧测力计使杠杆在如图(d)位置平衡,读出测力计的示数,并从杠杆上直接读出对应的力臂,结果发现:动力×动力臂≠阻力×阻力臂,于是小宇说,杠杆平衡条件在此种情况下不成立,你知道其中的原因吗?
。


其数学表达式表示为c=Q/m△t(其中△t表示温度的变化量).不同的物质,比热容是不同的.同理,不同物质的热膨胀程度不同,这可以用体膨系数β来表示,单位体积的某种物质,温度升高1℃时体积的变化叫做这种物质的体膨系数,下面是在压强不变时,某些固体、液体在接近室温时的体膨系数:
(1)由上述表格看出,金属的熔点越,体膨系数就越.
(2)请用初中物理所学过的物理量符号写出物体体膨系数卢的数学表达式β=.
如图所示是“测量小灯泡额定功率”的实验电路图,已知小灯泡的额定电压为3.8 V.
(1)请按照电路图,在图乙中将电压表正确连入电路;
(2)闭合开关前,滑动变阻器的滑片应调至最▲(填“左”或“右”)端;
(3)闭合开关,调节滑动变阻器滑片使电压表的示数为3.8 V,此时电流表的示数如图丙所示.则该小灯泡正常工作时的电流为▲A,它的额定功率为▲___W.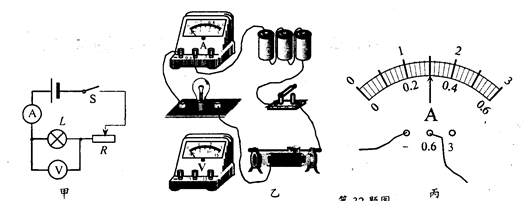
如图所示是某同学没计的一种测定油箱内油面高度的实验装置.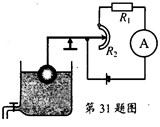
(1)它的工作原理是:油箱内油面▲时(选填“上升”或“下降”),金属滑片向上端移动,电流表示数会▲(填“变大”或“变小”).
(2)请你对该同学在设计中使用电阻R1做出评价:▲.
(3)你认为该设计中值得改进的方面是:▲.
小明在学了欧姆定律后归纳了滑动变阻器在不同情况下的作用不同:
(1)滑动变阻器本身的作用:通过改变接入电路中电阻线的▲来改变电路中的电阻,从而来改变电路中的▲(选填“电流”或“电压”);
(2)在探究电阻R不变时,研究通过它的电流与其两端电压的关系时,滑动变阻器的作用是:通过改变电路中的电流从而来改变电阻两端的▲;
(3)在探究电阻两端的电压不变时,研究通过它的电流与电阻大小的关系时,滑动变阻器的作用是:通过改变电路中的电流从而来▲;
(4)在“伏安法”测未知电阻实验中,滑动变阻器的作用是:通过改变电路中的电流从而来改变电阻两端的电压最终实现▲的目的.
 粤公网安备 44130202000953号
粤公网安备 44130202000953号