如图所示,在光滑水平面上放有质量为M = 3kg的长木板,在长木板的左端放有m = 1kg的小物体,小物体大小可忽略不计。小物块以某一初速度 匀减速运动。已知小物块与长木板表面动摩擦因数
匀减速运动。已知小物块与长木板表面动摩擦因数 ,当小物块运动了t = 2.5s时,长木板被地面装置锁定,假设长木板足够长(g=10m/s2)
,当小物块运动了t = 2.5s时,长木板被地面装置锁定,假设长木板足够长(g=10m/s2)
求:
(1)小物块刚滑上长木板时,长木板的加速度大小?
(2)长木板被锁定时,小物块距长木板左端的距离?
如图所示,倾角为300的光滑斜面的下端有一水平传送带。传送带正以v=6m/s的速度运动,运动方向如图所示。一个质量为2㎏的物体(物体可以视为质点),从h=3.2 m高处由静止沿斜面下滑,物体经过A点时,无论是从斜面到传送带还是从传送带到斜面,都不计其速率变化.物体与传送带间的动摩擦因数为0.5,传送带左右两端A、B间的距离LAB =10m,重力加速度g=10 m/s2,则: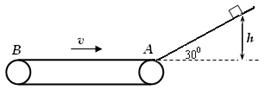
(1)物体由静止沿斜面下滑到斜面末端需要多长时间?
(2)物体在传送带上向左最多能滑到距A多远处?
(3)物体随传送带向右运动,最后沿斜面上滑的最大高度h′?
倾角θ=370的斜面体固定在水平地面上,一根轻绳跨过固定在斜面顶端的定滑轮,绳的一端与质量为ml="1" kg的物块A连接,且绳与斜面平行;另一端与质量为m2=3kg的物块B连接.开始时,用手按住A,使B悬于距地面高H=0.6m处,而A静止于斜面底端。如图所示.现释放B,试求此后A在斜面上向上滑行的最大距离? (设斜面足够长,且所有接触面间的摩擦均忽略不计,sin370=0.6,cos370=0.8,g取10m/s2)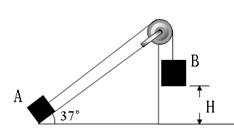
甲车以10m/s的速度在平直的公路上匀速行驶,乙车以4m/s的速度与甲车平行同向做匀速直线运动,甲车经过乙车旁边开始以0.5m/s2的加速度刹车,从甲车刹车开始计时,求:
1)乙车再次追上甲车前,两车相距的最大距离;
(2)乙车再次追上甲车所用的时间。
如图所示,电动机通过其转轴上的绝缘细绳牵引一根原来静止的长为L=1m,质量m=0.1㎏的导体棒ab,导体棒紧贴在竖直放置、电阻不计的金属框架上,导体棒的电阻R=1Ω,磁感强度B=1T的匀强磁场方向垂直于导体框架所在平面,当导体棒在电动机牵引下上升h=3.8m时,获得稳定速度,此过程导体棒产生热量Q=2J。电动机工作时,电压表、电流表的读数分别为7V和1A,电动机的内阻r=1Ω,不计一切摩擦,g=10m/s2,求: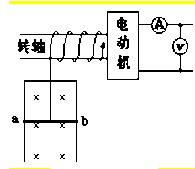
(1)导体棒所达到的稳定速度是多少?
(2)导体棒从静止到达稳定速度的时间是多少?
 = L1,
= L1, = L2,绕OO′轴在磁感强度为B的磁场中以角速度ω转动(不计一切摩擦),线圈电阻为r ,外电路负载电阻为R 。试求:
= L2,绕OO′轴在磁感强度为B的磁场中以角速度ω转动(不计一切摩擦),线圈电阻为r ,外电路负载电阻为R 。试求:
 粤公网安备 44130202000953号
粤公网安备 44130202000953号