如图甲所示,将一根质量分布均匀的金属硬棒的一端通过铰链固定在O点,并能使金属棒绕O点在竖直面内自由转动。现通过一个“拉力—距离传感器”可对硬棒施加一个竖直向上的力,使硬棒在水平位置始终保持平衡。已知硬棒的长度是1.2m,“拉力—距离传感器”可自动记录拉力F的大小和拉力作用点到O点的距离x,并将记录的结果输送到计算机绘制出F与x的关系图线。若计算机上显示出的拉力F与距离x倒数的变化关系如图乙所示,则可知金属棒所受的重力为 N。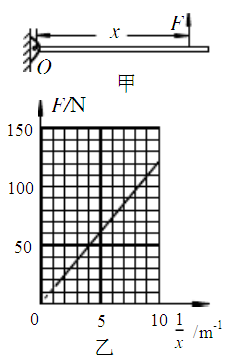
相关知识点
推荐套卷
 粤公网安备 44130202000953号
粤公网安备 44130202000953号