物理兴趣小组同学对物体的浮沉条件进行研究。在一个重为4N,底面积为200cm2的圆柱体薄壁玻璃容器底部,放一个边长为10cm的正方体物块,然后逐渐向容器中倒水(水始终未溢出)。通过测量容器中水的深度h,分别计算出该物块所受到的浮力F浮,并绘制了如图所示的图像。请回答下列问题。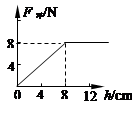
(1) 分析图像可知,水的深度由0逐渐增加到8cm前的过程中,物块受到的浮力怎样变化?
(2) 当容器中的水深超过8cm以后,物块处于什么状态?为什么?
(3) 物块的密度是多少?
相关试题
如图甲是建筑工地上的塔式起重机示意图,它是通过电动机带动如图乙所示滑轮组起吊物料的。如果这个滑轮组把6×103N的重物在10s内匀速提升10m,绳索自由端的拉力F=2.1×103N,不计一切摩擦和绳重。求:
(1)拉力的功率;
(2)该滑轮组的动滑轮重;
(3)该滑轮组的机械效率。
小明家新安装了一台容积为0.5m3的太阳能热水器,加满水后,经过4h阳光的照射,水温由原来的20℃升高到40℃.问:
(1)在这4h内水吸收了多少热量?
(2)若这些热量由效率为20%的火炉燃烧焦炭来提供,则需要燃烧多少千克焦炭?[水的比热容C水=4.2×103J/(kg.℃)、焦炭的热值q=3.0×107J/kg]
(4分)在如图电路中,闭合开关S后,电流表A1、A2的示数分别为0.38A和0.7A,电压表的示数为4.5V.试求:
(1)灯L1、L2中的电流I1和I2;
(2)L1两端的电压U1和电源电压U.

相关知识点
推荐套卷
 粤公网安备 44130202000953号
粤公网安备 44130202000953号