如图所示是利用 网络实现远程驾驶的汽车,其质量为 ,车轮与地面接触的总面积为 ,该车在水平路面上匀速直线行驶 ,用时 ,消耗汽油 ,这一过程中汽车发动机的输出功率为 .求:(汽油热值为 , 取
(1)汽车静止在水平地面上时,对地面的压强。
(2)在这一过程中汽车受到的阻力。
(3)在这一过程中汽车发动机的效率。

小波班上有一台饮水机,它的铭牌如下表,工作电路如图所示,S0 是温控开关,可以自动控制饮水机的加热或保温状态。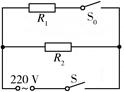
(1)将2 kg的水从25 ℃加热到85 ℃,水吸收的热量是多少?[c水=4.2×103 J/(kg•℃)]
(2)若在保温状态下,饮水机消耗的功率是44 W,则 R2 的阻值是多少?
(3)饮水机在加热状态下将2 kg的水从25 ℃加热到85 ℃时正常工作了20 min,则饮水机消耗的电能是多少? 饮水机的效率为多少?
沼气是当前已开发和使用的一种新型能源。通过将农村大量的秸秆、人畜粪便等发酵来获取沼气,利用沼气来烧水做饭、点灯照明.沼气的主要成分为甲烷,它燃烧后的产物是二氧化碳和水,对环境无污染.图所示是一农户沼气池及使用沼气的示意图.[水的比热容为4.2×103 J/(kg·℃),沼气的热值约为1.9×107 J/m3]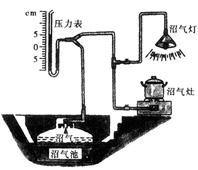
(1)沼气是(选填“可再生”或“不可再生”)能源。
(2)若沼气灶前的沼气压强至少为0.5 kPa时,沼气灶能正常工作.根据图中压力表(实质上是一个U形管压强计,里面装有染成红色的水)的示数,通过计算说明,该农户此时,能否使用这个沼气池中的沼气来正常烧火做饭?
(3)若沼气灶正常工作时,将一壶质量为2.5kg、温度为20 ℃的水烧开,需要消耗沼气0.13 m3.试估算沼气灶烧水的效率.
(4)推广使用沼气对新农村建设有什么好处?(写出一条即可)
电动汽车越来越受到人们的青睐,如图所示.电动版朗逸是大众汽车首款完全在中国开发的车型.它已在北京车展上和世人见面.该车具有出色的动力表现,从静止加速到100 km/h用时11 s,运动路程为165 m.请根据题目信息,求: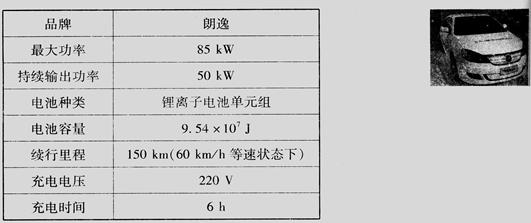
(1)电动汽车将____________能转化为电能,驱动运转时,将电能转化为______________能
(2)电动汽车充满电连续行驶的时间;
(3)电动汽车从静止加速到100 km/h的过程中的平均速度;
(4)在持续输出功率下,当电动车以100 km/h的速度行驶时,电动机所提供的牵引力.
(5)相对于使用燃料的汽车,电动汽车有什么优点?
如图甲所示,一个底面积为50 cm2的烧杯装有某种液体,把重2.4N的小石块放在木块上,静止时液体深h1;如图乙所示,将小石块放入液体中,液体深h2="12" cm,石块对杯底的压力F=1.6N;如图丙所示,取出小石块后(假设没有液体带出), 液体深h3=10cm。
求:(1)小石块的密度;
(2)液体的密度;
(3)h1的深度 。(g取10N/kg)
 粤公网安备 44130202000953号
粤公网安备 44130202000953号