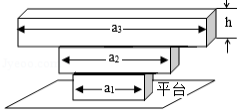
学校机器人兴趣小组进行了"精准吊装"试验。 块长短不一的长方体木块均平放在水平试验平台上,机器人将木块按长度从小到大依次吊装并对称叠放,如图。已知木块的宽度相同,高度均为 ,密度均为 ,长度分别为 , 、 , 且长度之比 , 取
(1)求吊装前长度为 的木块对试验平台的压强;
(2)若该平台够承受的最大压强为 ,平台上最多能叠放几块木块?
(3)若吊装某木块的过程中需克服木块重力做功 .吊装下一块需做功 ,则再吊装下一块需做功多少?
实际测量中使用的大量程电流表是由小量程电流表改装而成的。图中 是满偏电流(即小量程电流表允许通过的最大电流) 的电流表,其电阻 ,图为某同学改装后的电流表电路图, 、 为定值电阻。若使用 和 两个接线柱时,电表的量程为 ;若使用 和 两个接线柱时,电表的量程为 ,求 , 的阻值。

理论上分析:浸在液体中的物体受到的浮力就是液体对物体表面压力的合力。如图所示,一个底面积为 ,高为 的长方形浸没在密度为 的液体中。
(1)分析该物体侧面所受液体压力的合力 ;
(2)求出该物体底面所受液体压力的合力 ;
(3)结合以上结果,说明该理论分析与阿基米德原理的表述是一致的。

某家用轿车,重为 ,当车以 的速度匀速直线行驶了 ,消耗汽油 ,期间受到的阻力为车重的0.08倍。已知汽油的热值为 。在此过程中,求:
(1)车通过的路程;
(2)牵引力做功的功率;
(3)汽车发动机的效率。
要求测量额定电压为 小灯泡的电功率。
(1)按照电路图 ,将图 的实物连接成实验电路。

(2)在电路连接过程中开关应处于 状态;闭合开关前,要把滑动变阻器的滑片移到 (根据你连接的实物电路图选填"最右端"或"最左端" 。
(3)实验时某次电压表的示数为 ,对应电流表的示数如图所示,则小灯泡此时的功率为 ;要想测出小灯泡的额定电功率,接下来的操作是: 。
为研究弹簧的性质,我们在竖直悬挂的弹簧下加挂钩码(如图 ,同时记录弹簧总长度 与钩码质量 ,所得数据记录在表一中。已知弹簧原长 。实验过程中,弹簧形变在弹性限度内,不计弹簧所受的重力。 取

表一:
|
实验次数 |
1 |
2 |
3 |
4 |
5 |
6 |
|
钩码质量 |
0 |
30 |
60 |
90 |
120 |
150 |
|
弹簧总长度 |
6.0 |
7.2 |
8.4 |
9.6 |
10.8 |
12.0 |
(1)请根据表一中的数据,将表二填写完整;
表二:
|
实验次数 |
1 |
2 |
3 |
4 |
5 |
6 |
|
弹力 |
0 |
0.3 |
0.9 |
1.5 |
||
|
弹簧伸长量△ |
0 |
1.2 |
3.6 |
6.0 |
(2)请在图 坐标系中描点作出弹力 跟弹簧伸长量△ 的关系图象。
(3)本实验的结论就是弹簧测力计的工作原理。只有规范使用弹簧测力计,才能准确测量力的大小,请写出一条正确使用弹簧测力计的操作要求: 。
 粤公网安备 44130202000953号
粤公网安备 44130202000953号