如图所示是打捞物体的模拟装置。现电动机带动钢丝绳自由端以 的速度匀速拉动滑轮组,经过 将体积为 的物体由海底提升到海面,物体离开海面后钢丝绳自由端的速度变为 ,此时电动机的输出功率比物体在海水中时增大了 (不计物体的高度、绳重和摩擦, , 取 , 取 。求:
(1)物体浸没在海水中受到的浮力;
(2)物体在海底时的深度;
(3)物体在海底时受到海水的压强;
(4)物体在海面下匀速上升过程中,该滑轮组的机械效率(不计动滑轮体积)

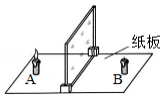
如图是“探究平面镜成像的特点”的实验装置。
(1)实验中用玻璃板代替平面镜,主要利用了玻璃透明的特点,便于确定 ,玻璃板放置时要求与纸板 。
(2)在玻璃板前面放一支点燃的蜡烛 ,再拿一支没点燃的相同的蜡烛 ,在玻璃板后面移动,直至与蜡像 的像重合,这样做是为了比较像与物的 关系;若用光屏替代蜡烛 ,在光屏上观察不到蜡烛 的像,说明平面镜成的是 (选填“实”或“虚” 像。


图甲为一智能路灯工作原理简图,已知控制电路中电源电压恒为 , 为滑动变阻器, 为光敏电阻,其阻值随光照强度(单位符号: 变化的规律如图乙所示。工作电路中,路灯 上标有“ ”字样。当光照足够强时,路灯 不工作;当光照强度降为 ,控制电路中电流为 时,工作电路刚好启动,路灯 正常工作。电磁铁线圈的电阻忽略不计。试问:

(1)工作电路刚好启动时,滑动变阻器 接入电路的阻值为多少?
(2)保持 接入电路的阻值不变,当电流表示数为 时,光照强度为多少?
(3)为了节能,要使光照强度低于 时,工作电路才开始启动,应将滑动变阻器 滑片向 (选填“左”或“右” 移动,并简要说明理由。

 粤公网安备 44130202000953号
粤公网安备 44130202000953号