已知地球半径为R,引力常量为G,地球同步通信卫星周期为T,它离地面的高度约为地球半径的6倍。
(1)求地球的质量;
(2)若地球的质量是某行星质量的16倍,地球的半径是该行星半径的2倍。该行星的同步卫星距其表面的高度是其半径的2.5倍,求该行星的自转周期。
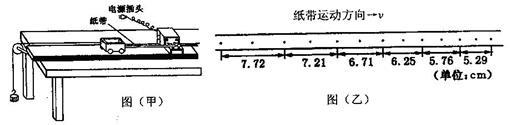
如图所示是某同学设计的“探究加速度a与力F、质量m的关系”的实验。图(甲)为实验装置简图,图中A为小车,B为打点计时器,C为装在砂的砂桶,D为一端带有定滑轮的长方形木板,实验中认为细绳对小车拉力F等于砂和砂桶总重力,小车运动加速度a可由纸带求得。
| 次数 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
| 小车加速度a/m·s 2 |
1.90 |
1.72 |
1.49 |
1.25 |
1.00 |
0.75 |
0.50 |
0.30 |
| 小车质量m/kg |
0.25 |
0.29 |
0.33 |
0.40 |
0.50 |
0.71 |
1.00 |
1.67 |
 |
4.00 |
3.50 |
3.00 |
2.5 |
2.00 |
1.40 |
1.00 |
0.60 |
(1)图(乙)为某次实验得到的纸带(交流电的频率为50Hz),根据图中的数据求出小车加速度大小为 m/s2;
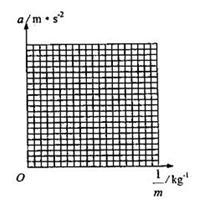
(2)保持砂和砂桶质量不变,改变小车质量m,分别得到小车加速度a与质量m及对应的 数据如表中所示。根据表中数据,在图坐标纸中作出F不变时a与1/m的图像;从图线中得到F不变时小车加速度a与质量m间定量关系是 。
数据如表中所示。根据表中数据,在图坐标纸中作出F不变时a与1/m的图像;从图线中得到F不变时小车加速度a与质量m间定量关系是 。
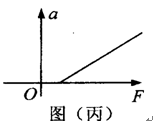
(3)保持小车质量不变,改变砂和砂桶质量,该同学根据实验数据作出了加速度a与合力F图线如图(丙)所示,该图线不通过坐标原点,其主要原因是 。
与打点计时器一样,光电计时器也是一种研究物体运动情况时常用的计时仪器,如图(甲)所示,a、b分别是光电门的激光发射和接收装置。现利用如图(乙)所示的装置验证“机械能守恒定律”。方法是:在滑块上安装一遮光板,把滑块放在水平放置的气垫导轨上,通过跨过定滑轮的细绳与钩码相连,连接好1、2两个光电门,在图示位置释放滑块后,光电计时器记录下滑块上的遮光板先后通过两个光电门的时间分别为△t1、△t2。已知滑块(含遮光板)质量为M、钩码质量为m、两光电门间距为s、遮光板宽度为L、当地的重力加速度为g。
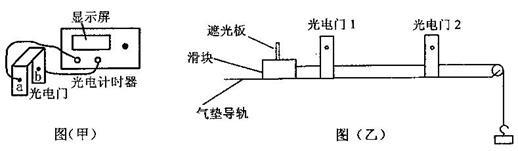
(1)计算滑块先后通过两个光电门时的瞬时速度的表达式为v1= v2= (用题目中给定的字母表示)
(2)本实验中验证机械能守恒的表达式为 (用题目中给定的字母表示)。
“探究加速度与力、质量的关系”的实验装置如图甲所示,实验时小刚同学将长木板平放在水平桌面上,并利用安装在小车上的拉力传感器测出细线的拉力,保持小车的质量不变,通过改变钩码的个数,得到多组数据,从而确定小车加速度a与细线拉力F的关系。

(1)图乙中符合小刚的实验结果的是____

(2)小丽同学做该实验时,拉力传感器出现了故障。为此,小丽同学移走拉力传感器,保持小车的质量不变,并改进了小刚实验操作中的不足之处。用所挂钩码的重力表示细线的拉力F,则小丽同学得到的图象可能是乙图中____;小森同学为得到类似乙图中的A图,在教师的指导下,对小丽同学的做法进行如下改进:称出小车质量M、所有钩码的总质量m,先挂上所有钩码,多次实验,依次将钩码摘下,并把每次摘下的钩码都放在小车上,仍用F表示所挂钩码的重力,画出a-F图,则图线的斜率 k=_ ___。(用题中给出的字母表示)
小明同学在“探究弹力和弹簧伸长的关系”时,安装好如图所示的实验装置:让刻度尺零刻度与弹簧上端平齐,在弹簧下端挂1个钩码,静止时弹簧长度为Z,,根据此时固定在弹簧挂钩上的指针在刻度尺(最小分度是1mm)上位置的放大图,可读出弹簧的长度l1=_ cm。在弹簧下端分别挂2个、3个、4个、5个相同钩码,静止时弹簧长度分别是l1、l3、l4、l5。实验中,当挂3个钩码时,弹簧长度为24.95 cm。已知每个钩码质量是50 g,当地重力加速度g="9.80" m/s2,据此小明计算出弹簧的劲度系数为____ N/m(结果保留三位有效数字)。小红同学发现小明的计算结果与弹簧的标称值相差较大,请你帮助小红提出更合理的数据处理方案:____

某研究性学习小组设计了利用力传感器和光电门传感器探究“动能定理”的实验,他们将力传感器固定在小车上,用不可伸长的细线通过一个定滑轮与重物G相连,用力传感器记录小车受到拉力的大小。在水平轨道上A、B两点各固定一个光电门传感器,用于测量小车通过A、B两点时的速度 和
和 ,如图所示。在小车上增减砝码来改变小车质量,用不同的重物G来改变拉力的大小,摩擦力不计。
,如图所示。在小车上增减砝码来改变小车质量,用不同的重物G来改变拉力的大小,摩擦力不计。

(1)实验主要步骤如下:
①测量小车和拉力传感器的总质量M1,把细线的一端固定在力传感器上,另一端通过定滑轮与重物G相连,正确连接所需电路;
②将小车停在点C,由静止开始释放小车,小车在细线拉动下运动。除了光电门传感器测量速度和力传感器测量拉力的数据以外,还应该记录的物理量为 ;
③改变小车的质量或重物的质量,重复②的操作。

(2)右侧表格中M是M1与小车中砝码质量之和,DEk为动能变化量,F是拉力传感器的示数,W是
F在A、B间所做的功。表中的DE3=_________,W3=__________(结果保留三位有效数字)。
(3)根据上述实验数据可以得出的实验结论:
。
 粤公网安备 44130202000953号
粤公网安备 44130202000953号