图甲中,质量为m的物块叠放在质量为2m的足够长的木板上方右侧,木板放在光滑的水平地面上,物块与木板之间的动摩擦因数为μ=0.2.在木板上施加一水平向右的拉力F,在0~3s内F的变化如图乙所示,图中F以mg为单位,重力加速度g=10m/s2.整个系统开始时静止.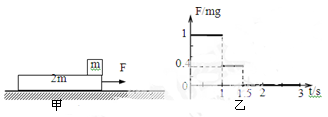
(1)求1s、1.5s、2s、3s末木板的速度以及2s、3s末物块的速度;
(2)在同一坐标系中画出0~3s内木板和物块的v-t图象,据此求0~3s内物块相对于木板滑过的距离。
如图所示,足够长的两根相距为0.5 m的平行光滑导轨竖直放置,导轨电阻不计,磁感应强度B为0.8 T的匀强磁场的方向垂直于导轨平面.两根质量均为0.04 kg的可动金属棒ab和cd都与导轨接触良好,金属棒ab和cd的电阻分别为1 Ω和0.5 Ω,导轨最下端连接阻值为1 Ω的电阻R,金属棒ab用一根细绳拉住,细绳允许承受的最大拉力为0.64 N.现让cd棒从静止开始落下,直至细绳刚被拉断,此过程中电阻R上产生的热量为0.2 J(g取10 m/s2).求: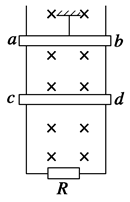
(1)此过程中ab棒和cd棒产生的热量Qab和Qcd;
(2)细绳被拉断瞬间,cd棒的速度v;
(3)细绳刚要被拉断时,cd棒下落的高度h.
如图所示,两根平行金属导轨固定在水平桌面上,每根导轨每米的电阻为r0=0.10 Ω/m,导轨的端点P、Q用电阻可忽略的导线相连,两导轨间的距离l=0.20 m.有随时间变化的匀强磁场垂直于桌面,已知磁感应强度B与时间t的关系为B=kt,比例系数k=0.020 T/s.一电阻不计的金属杆可在导轨上无摩擦地滑动,在滑动过程中保持与导轨垂直,在t=0时刻,金属杆紧靠在P、Q端,在外力作用下,杆以恒定的加速度从静止开始向导轨的另一端滑动,求在t=6.0 s时金属杆所受的安培力.
如图所示,在磁感应强度B=0.5 T的匀强磁场中,垂直于磁场方向水平放置着两根相距为h=0.1 m的平行金属导轨MN与PQ,导轨的电阻忽略不计.在两根导轨的端点N、Q之间连接一阻值R=0.3 Ω的电阻,导轨上跨放着一根长为L=0.2 m、每米长电阻r=2.0 Ω/m的金属棒ab,金属棒与导轨正交,交点为c、d.当金属棒以速度v=4.0 m/s向左做匀速运动时,试求: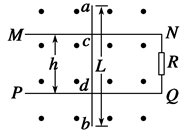
(1)电阻R中电流的大小和方向;
(2)金属棒ab两端点间的电势差.
如图所示,处于匀强磁场中的两根足够长、电阻不计的平行金属导轨相距1 m,导轨平面与水平面成θ=37°角,下端连接阻值为R的电阻.匀强磁场方向与导轨平面垂直,质量为0.2 kg、电阻不计的金属棒放在两导轨上,棒与导轨垂直并保持良好接触,它们之间的动摩擦因数为0.25.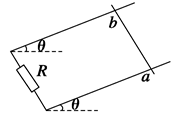
(1)求金属棒沿导轨由静止开始下滑时的加速度大小.
(2)当金属棒下滑速度达到稳定时,电阻R消耗的功率为8 W,求该速度的大小.
(3)在上问中,若R=2 Ω,金属棒中的电流方向由a到b,求磁感应强度的大小与方向.
(g取10 m/s2,sin 37°=0.6,cos 37°=0.8)

 粤公网安备 44130202000953号
粤公网安备 44130202000953号