体育课上,小明先后以相同的姿势分别沿绳子和杆匀速向上爬杆,若杆比绳子光滑一些,则这两次他受到的摩擦力 大; (选填“前一次”、“后一次”、“一样”)他 时所用的握力比较小一些。(选填“爬杆”或“爬绳”)
如图所示是简易压力传感器的原理图,弹簧甲连接在A、B两绝缘板之间,B板固定,滑动变阻器R的滑片P与A板相连,并可随A板一起运动。弹簧乙下端挂有一永磁体,永磁体正下方有一电磁铁,E为电源,R0为定值电阻。开关S闭合,电路接通后,电压表示数为U1,弹簧乙的总长度为l1;当用力F向下压弹簧甲后,电压表示数为U2,弹簧乙的总长度为l2,则U1 U2,l1 l2 (以上两空均选填“>”、“<”、“=”)。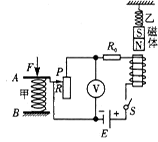
小欣用如图所示的动滑轮提升重量G=9N的物体,当用竖直向上F=5N的拉力拉绳的自由端匀速上升0.8m,用时4s,小欣所做的总功是 J,机械效率是 ,拉力的功率是 W。
冰箱是常用的家用电器,它有金属外壳,用三脚插头及其三孔插座将其外壳与 相连(选填“火线”、“零线”、“地线”)以防触电;在只有冰箱压缩机工作的情况下,家里标有“2000r/kW·h”的电能表转盘在6min内转过200转,在这6min内冰箱消耗的电能 kW·h,冰箱压缩机的电功率为 W;用保鲜膜包裹要冷藏的食物以防“串味”,这主要是因为分子在 。
在2013年5月的体考中,如图所示是康健同学在投掷实心球时球的运动轨迹,球在空中飞行的A、B、C、D四点中, 点处的重力势能最大, 点处的动能最大。实心球落地后,由于球具有 还要继续向前运动,在地面阻力的作用下,最后停在E点。

 粤公网安备 44130202000953号
粤公网安备 44130202000953号