我国探月工程实施“绕”“落”“回”的发展战略。第一步“绕”已于2007年11月17日成功实现,“嫦娥一号”成功实施第三次近月制动,进入周期为T的圆形越极轨道。这条轨道距离月球表面高为h0,经过月球的南北极上空。已知月球半径为R,万有引力恒量G 。.
(1)求月球的质量M
(2)第二步“落”计划于2012年实现,当飞船在月球表面着陆后,如果宇航员将一小球举高到距月球表面高h处自由释放,求落地时间t。
某电视娱乐节目装置可简化为如图所示模型.倾角θ=37°的斜面底端与水平传送带平滑接触,传送带BC长L=6m,始终以v0=6m/s的速度顺时针运动.将一个质量m=1kg的物块由距斜面底端高度h1=5.4m的A点静止滑下,物块通过B点时速度的大小不变.物块与斜面、物块与传送带间动摩擦因数分别为μ1=0.5、μ2=0.2,传送带上表面距地面的高度H=5m,g取10m/s2,sin37°=0.6,cos37°=0.8。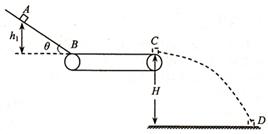
⑴求物块由A点运动到C点的时间;
⑵若把物块从距斜面底端高度h2=2.4m处静止释放,求物块落地点到C点的水平距离;
⑶求物块距斜面底端高度满足什么条件时,将物块静止释放均落到地面上的同一点D.
如图,POQ是折成60°角的固定于竖直平面内的光滑金属导轨,导轨关于竖直轴线对称,OP=OQ=L.整个装置处在垂直导轨平面向里的足够大的匀强磁场中,磁感应强度随时间变化规律为B=B0-kt(其中k为大于0的常数).一质量为m、长为L、电阻为R、粗细均匀的导体棒锁定于OP、OQ的中点a、b位置.当磁感应强度变为 B0后保持不变,同时将导体棒解除锁定,导体棒向下运动,离开导轨时的速度为v.导体棒与导轨始终保持良好接触,导轨电阻不计,重力加速度为g.求导体棒:
B0后保持不变,同时将导体棒解除锁定,导体棒向下运动,离开导轨时的速度为v.导体棒与导轨始终保持良好接触,导轨电阻不计,重力加速度为g.求导体棒: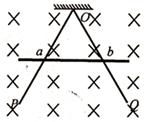
⑴解除锁定前回路中电流的大小及方向;
⑵滑到导轨末端时的加速度大小;
⑶运动过程中产生的焦耳热.
强激光的出现丰富了人们对光电效应的认识.用强激光照射金属时,由于其光子密度极大,一个电子在极短时间内吸收多个光子成为可能,从而形成多光子光电效应.如图所示,用频率为υ的强激光照射光电管阴极K,假设电子在极短时间内吸收两个光子形成光电效应,(已知该金属的逸出功为W0,普朗克常量为h,电子电荷量为e).求: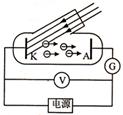
①光电子的最大初动能;
②当光电管两极间反向电压增加到多大时,光电流恰好为零.
如图,一玻璃水槽,水深h=1.2m,身高H=1.8m的人紧靠水槽站立.太阳光以与水平方向成θ=37°角射在水面上,测得人在水中底部的影长L=1.7m.(c=3×108m/s、sin37°=0.6,cos37°=0.8)求: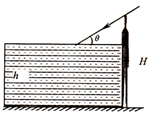
①水的折射率;
②光在水中的传播速度.

 粤公网安备 44130202000953号
粤公网安备 44130202000953号